ABB机器人坐标系说明
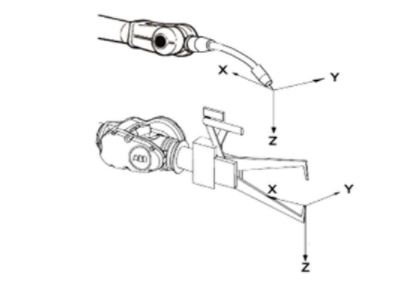
坐标系示意图
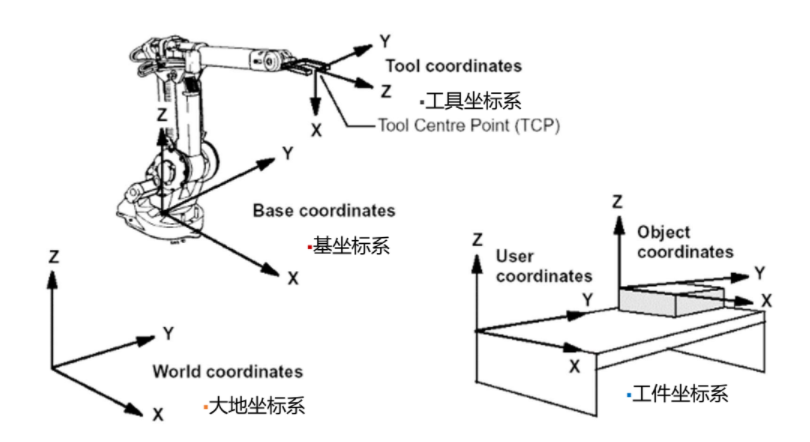
工具坐标系
- 机器人工具坐标系是由工具中心点TCP与坐标方位组成;
- 默认的tool0的TCP在6轴上法兰盘的中心位置;
- 机器人联动运行时,TCP是必须的:
- Reorient重定位运动(姿态运动):机器人TCP位置不变,机器人工具沿坐标轴转动,改变姿态。
- Linear线性运动:机器人工具姿态不变,TCP沿坐标轴线性运动。
- 机器人程序支持多个TCP,可以根据当前工作状态进行变换,这样,当机器人的工具被更换后,可以步变更程序,直接运行。
- 在TCP与基准点靠上的情况下使用重定位(姿态运动)模式来检验工具坐标系设定的效果。(所以重定位是用来干这个的?)
不同工具的工具坐标示例:
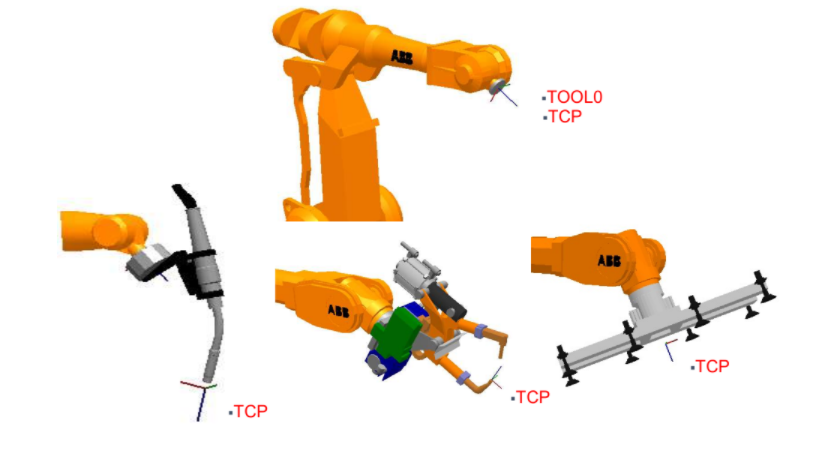
感觉TCP点一般在工具的末端或者中心,不要求很精确。
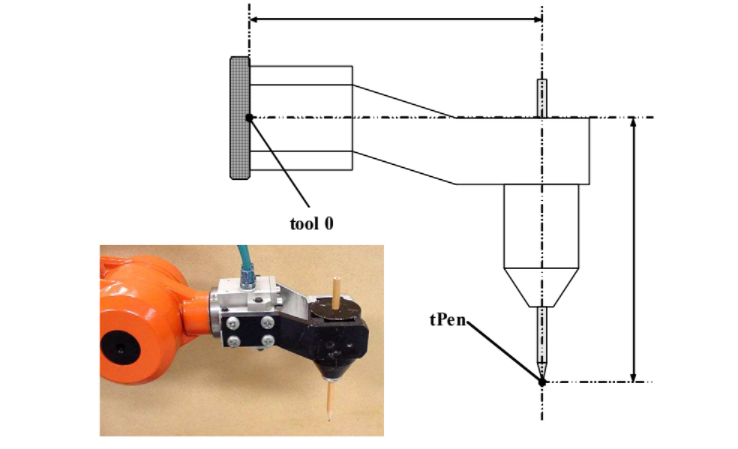
tPen坐标系相对tool0的TCP偏移:
工件坐标系
- 机器人工件坐标系是由工件原点与坐标方位组成;
- 机器人程序支持多个Wobj,可以根据当前工作状态进行变换;
- 当外部夹具被更换,使用对应的Wobj,可以不更改程序,直接运行;
通过不同的工具坐标以及工件坐标的组合复用,可以换线换治具的时候不用更改程序。
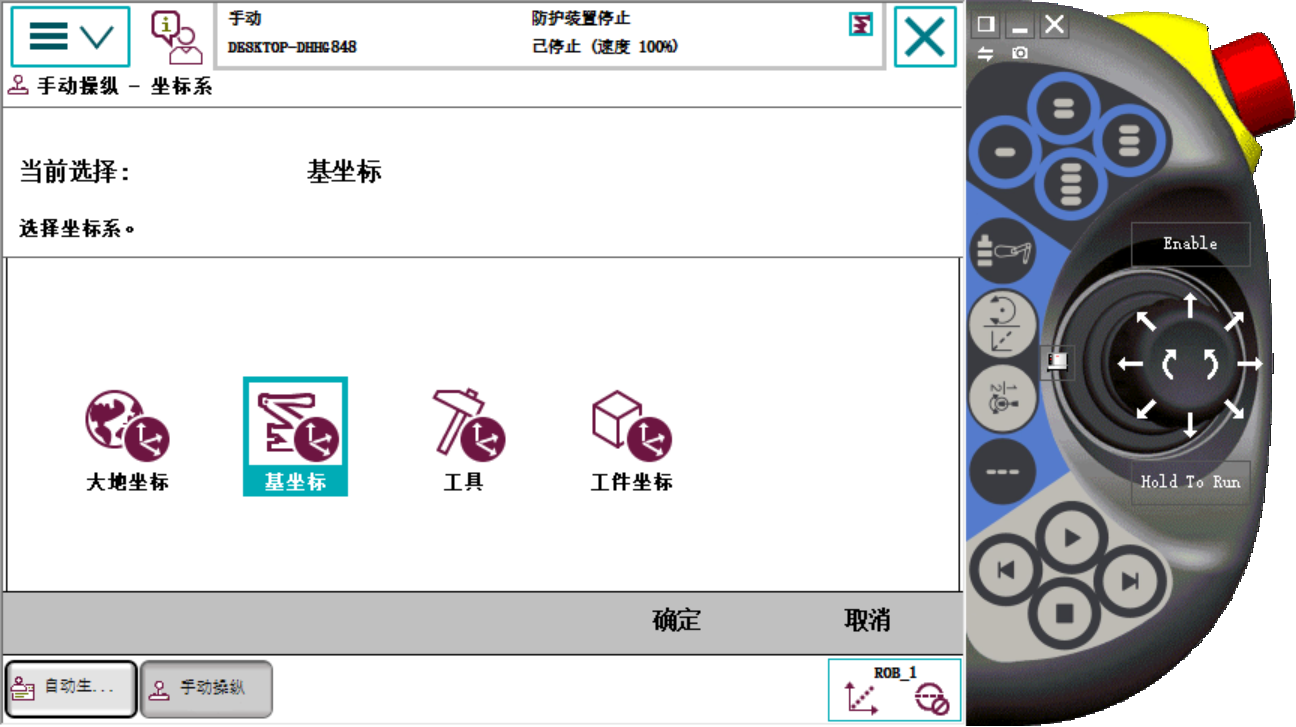
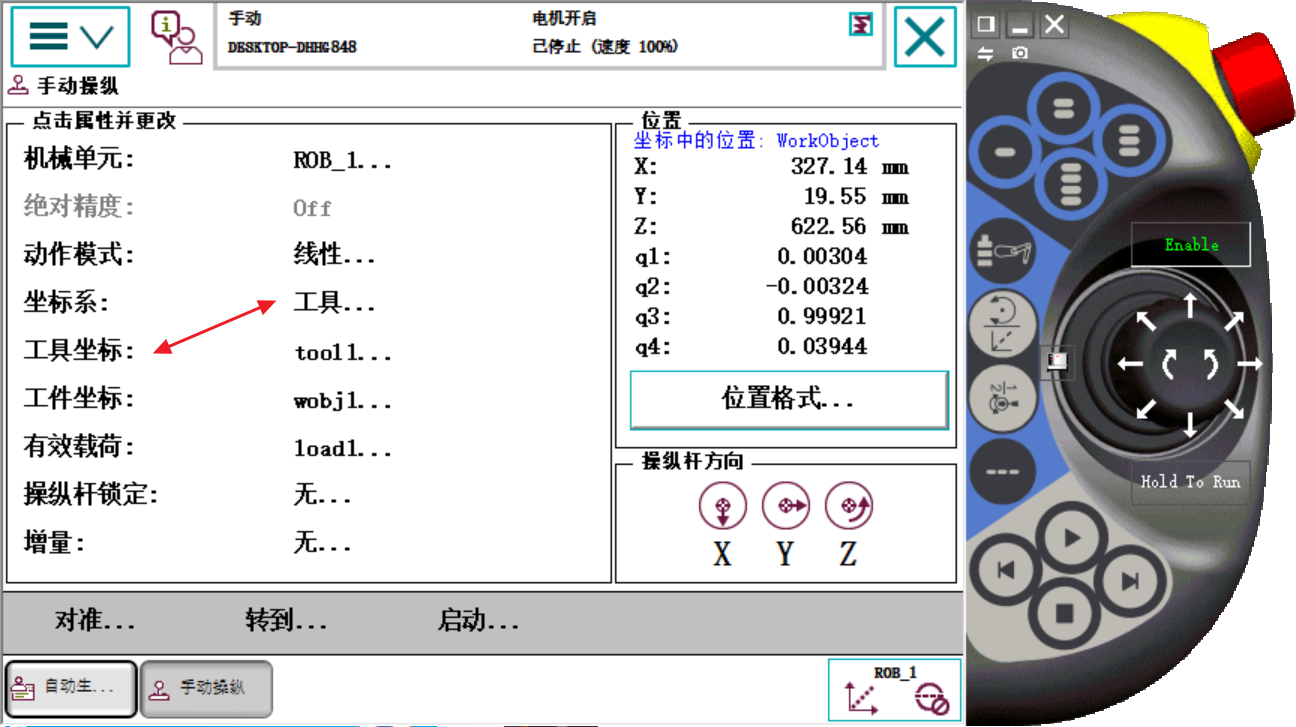
线性运动(Linear)模式下的坐标系选择
动作模式为轴运动的时候,坐标系只能是基坐标,灰色不可选择:
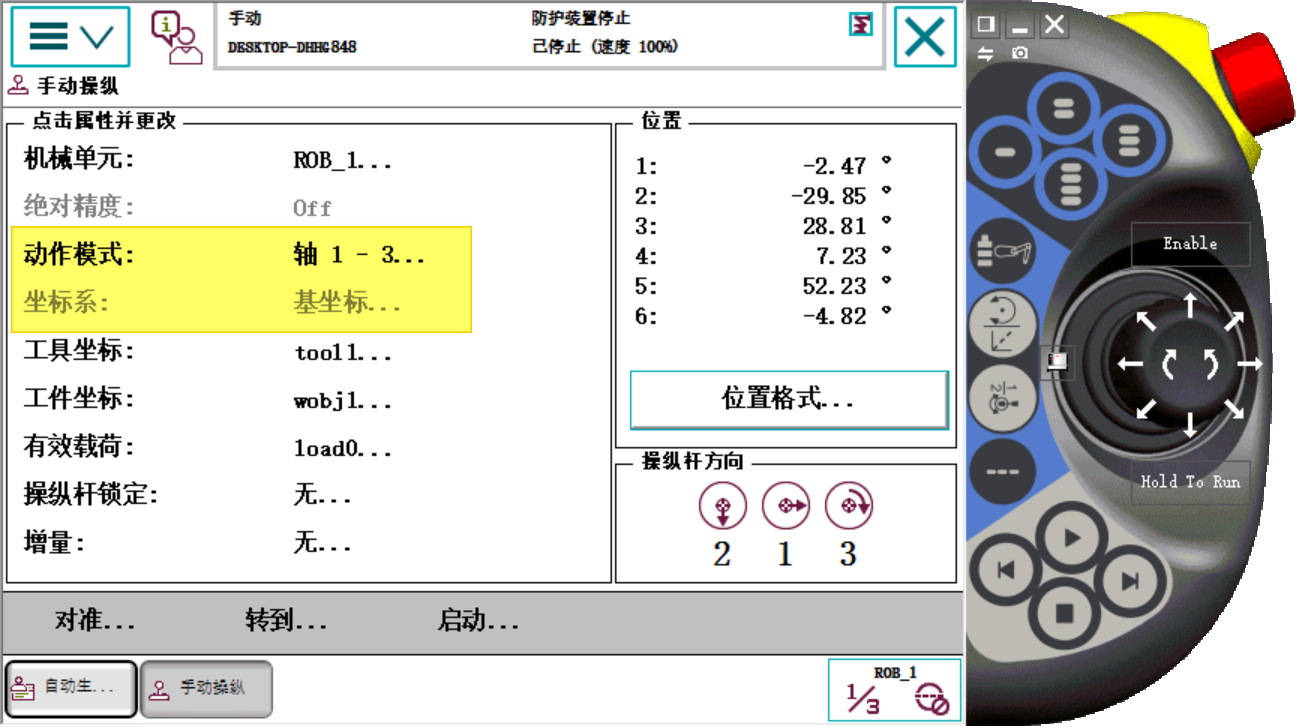
切换动作为线性后,既可以选择:
- 大地坐标: 大地坐标系在共工作单元或工作站的固定位置有相应的零点,有助于处理若干个机器人协作或由外轴移动机器人的情况。但在默认情况下,大地坐标系应该是与基坐标系一致的。
- 基坐标:位于机器人底座,最便于机器人从一个位置移动到另外一个位置的坐标系。
- 工具坐标:定义机器人到达预设定目标时所使用工具的位置。
- 工件坐标:工件坐标系与工件有关,通常是最适于对机器人进行编程的坐标系。
- 坐标系选择基坐标的时机:
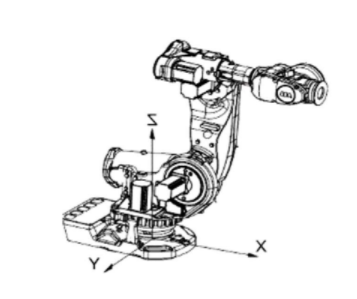
当需要将可预测的运动轻而易举的转化为控制杆的运动时,可以在基坐标系中进行控制。在许多情况下,极坐标系是使用最为方便的一种坐标系,因为它对工具,工件或其它机械单元没有依赖性。
- 坐标系选择大地坐标的时机:
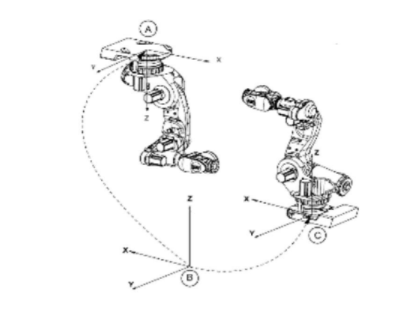
例如,有两个机器人,一个安装于地面,一个倒置,倒置的机器人的基坐标系也将颠倒。如果在倒置机器人的基坐标系中进行控制,则很难预测移动情况。此时可以选择共享大地坐标系。
- 坐标系选择工件坐标的时机:
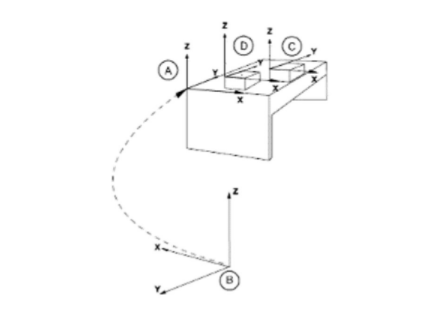
例如,你打算确定一系列孔的位置,以便沿着工件边缘钻孔。你打算在工件箱的两面隔板之间焊接。
需要指定工件坐标,工具坐标,有效载荷。
- 坐标系选择工具的时机:
使用工具体系对穿,钻,铣,锯等进行编程和调整时。
只需要指定工具坐标。
目前还不知道在坐标系里面选择的工具(或工件坐标),跟工具坐标里面选择的工具坐标的差异:
目前的理解应该是为了提高精度?焊接和钻孔要特别强调工件坐标,穿,钻,铣,锯对工具要求多用工具坐标,如果对精度要求不高,不选也没有关系?