ABB RobotStudio 虚拟示教器的使用
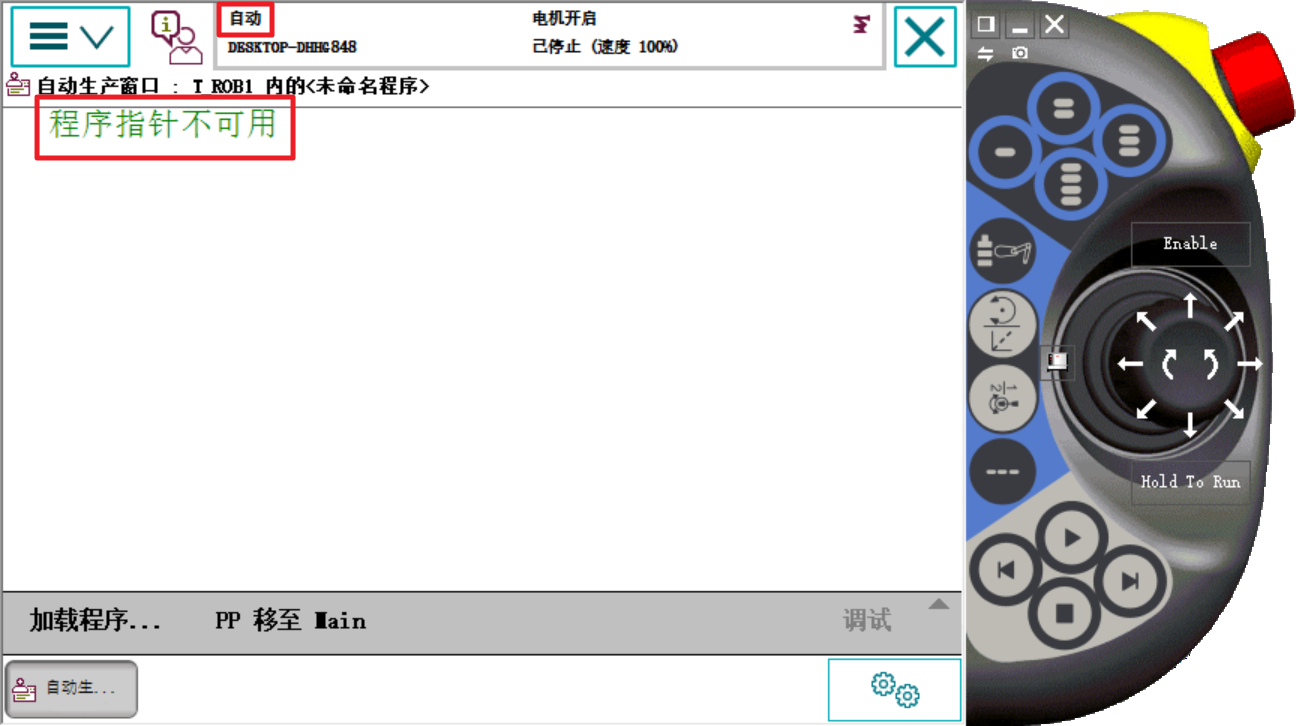
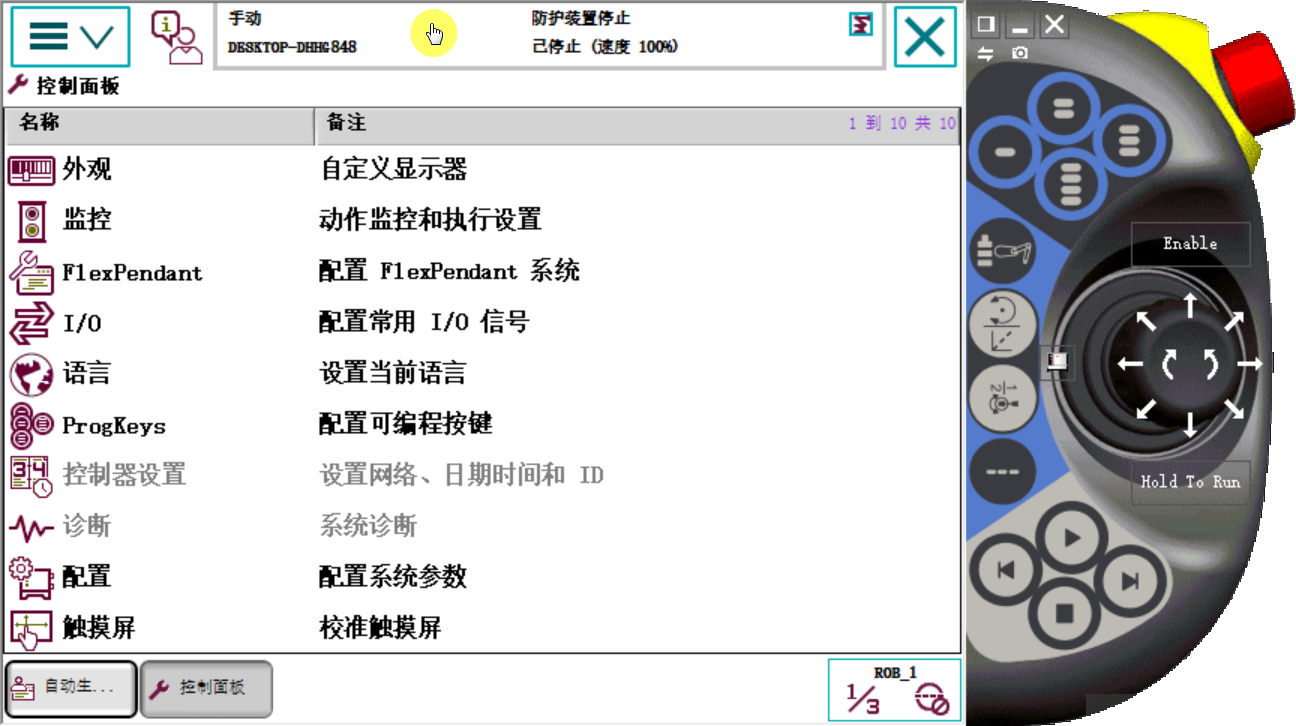
自动状态下机器人部分功能被禁用
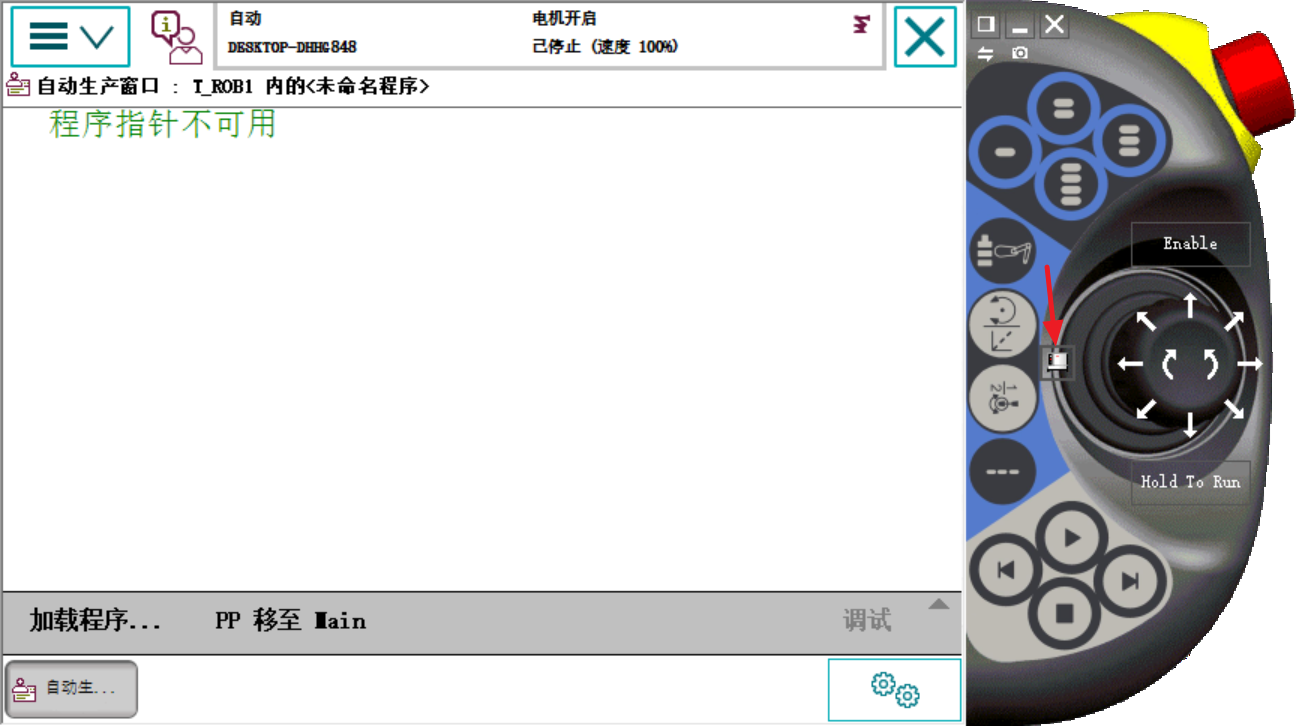
点击 Ctrol Panel
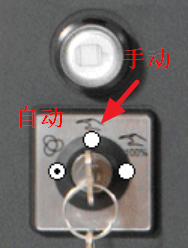
从自动切换到手动模式
查看事件日志
机器人数据备份与恢复
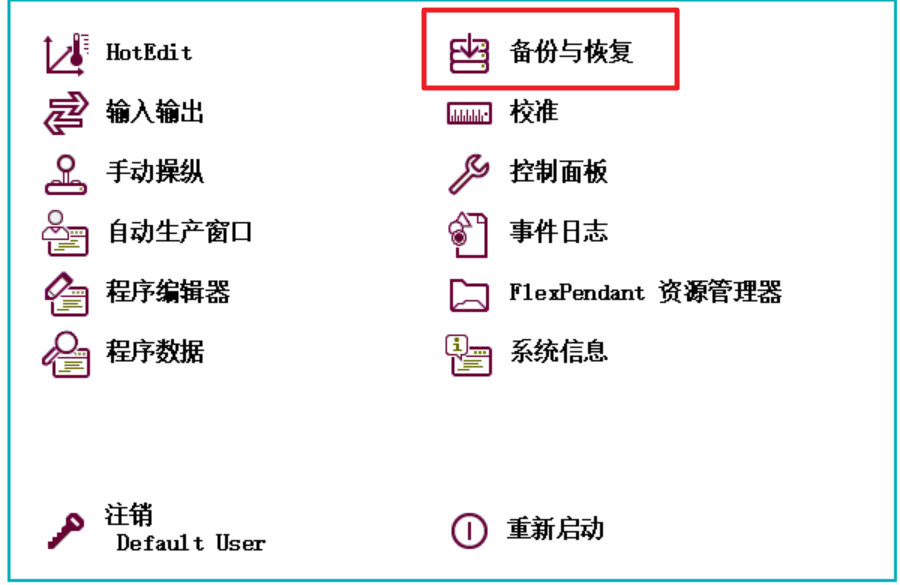
定期备份机器人数据(包含程序以及系统参数),可以在系统紊乱或者重装系统后快速恢复。
示教器说明
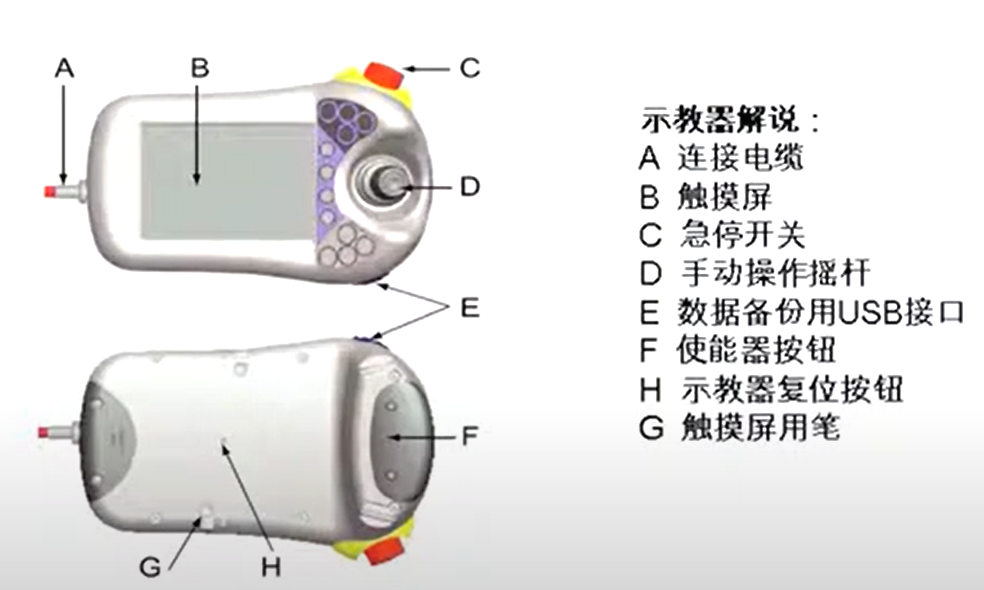
示教器按钮说明

| 按钮 | 说明 |
|---|---|
| A-D | 预设按钮,1-4,可定制的意思 |
| E | 选择机械单元 |
| F | 切换移动模式,重定向或者线性 |
| G | 切换移动模式,轴1-3或4-6 |
| H | 切换增量 |
| J | Step BACKWARD (步退)按钮,使程序后退一步的指令 |
| K | START (启动)按钮,开始执行程序 |
| L | Step FORWARD (步进)按钮,使程序前进一步的指令 |
| M | STOP (停止)按钮,停止程序执行 |
示教器握持

⚠️ 使能器分两档,主要是起安全保护作用,在手动状态下,按下并保持第一档,机器人处于“电机开启”状态,才可进行手动操作与程式调试。发生危险时,人本能的松开,或者按紧(此时使能器处于第二档,机器人处于防护装置停止状态),机器人会立即停止。
手动模式下的操作
菜单->手动操作->动作模式,先学习单轴1,2,3轴运动,选轴 1-3,确定:
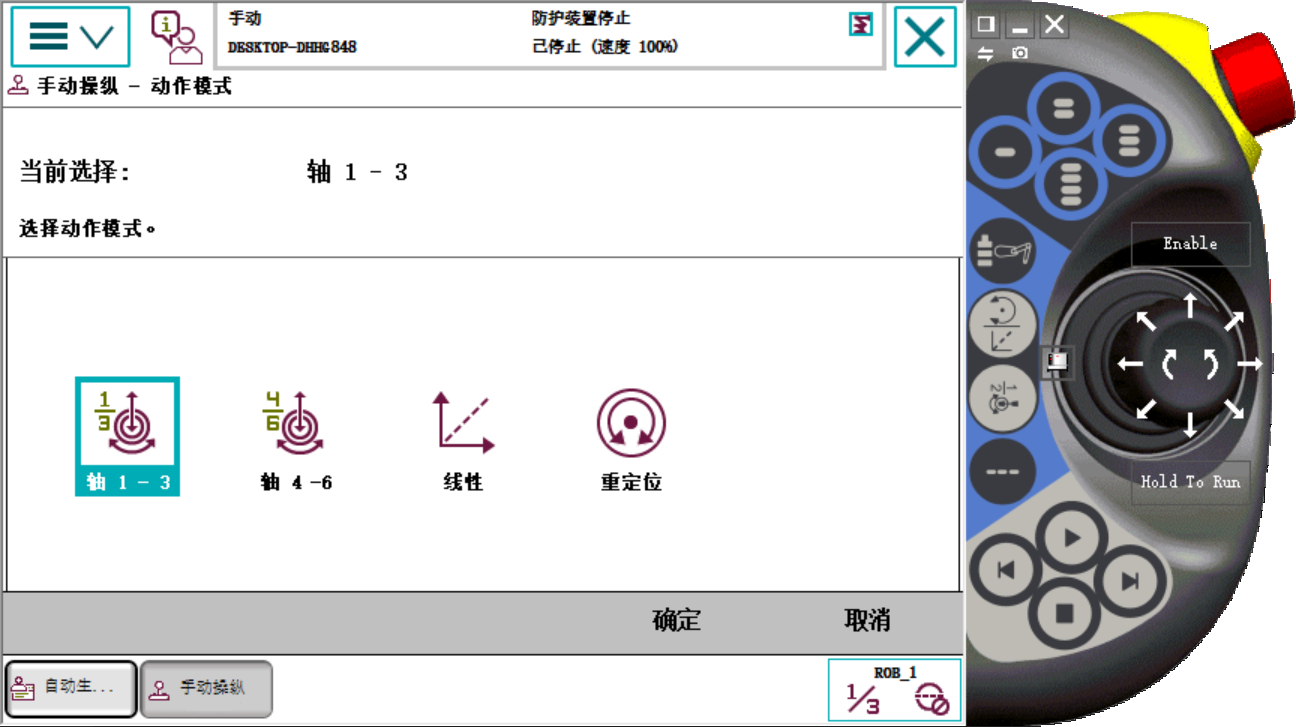
操作杆方向说明:
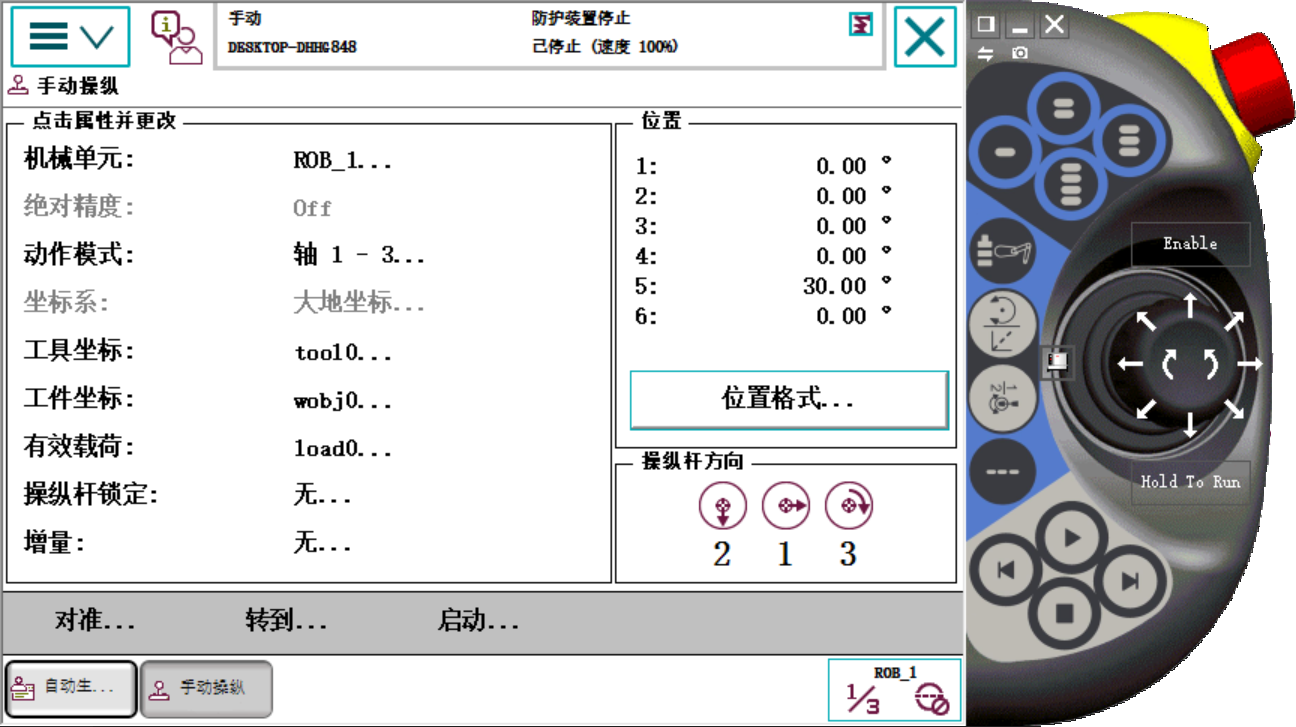
- 上下移动操纵杆,轴2运动;
- 左右移动操作杆,轴1运动;
- 旋转操纵杆,轴3运动;
- 操纵幅度越大,机器人运动速度越快;
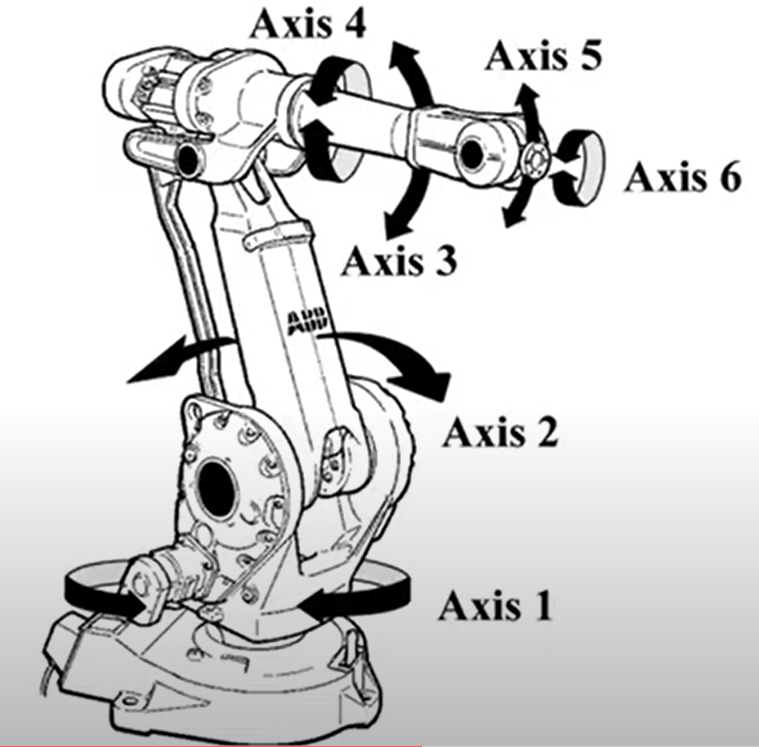
6轴机器人各轴运动说明:
虚拟示教器操作:
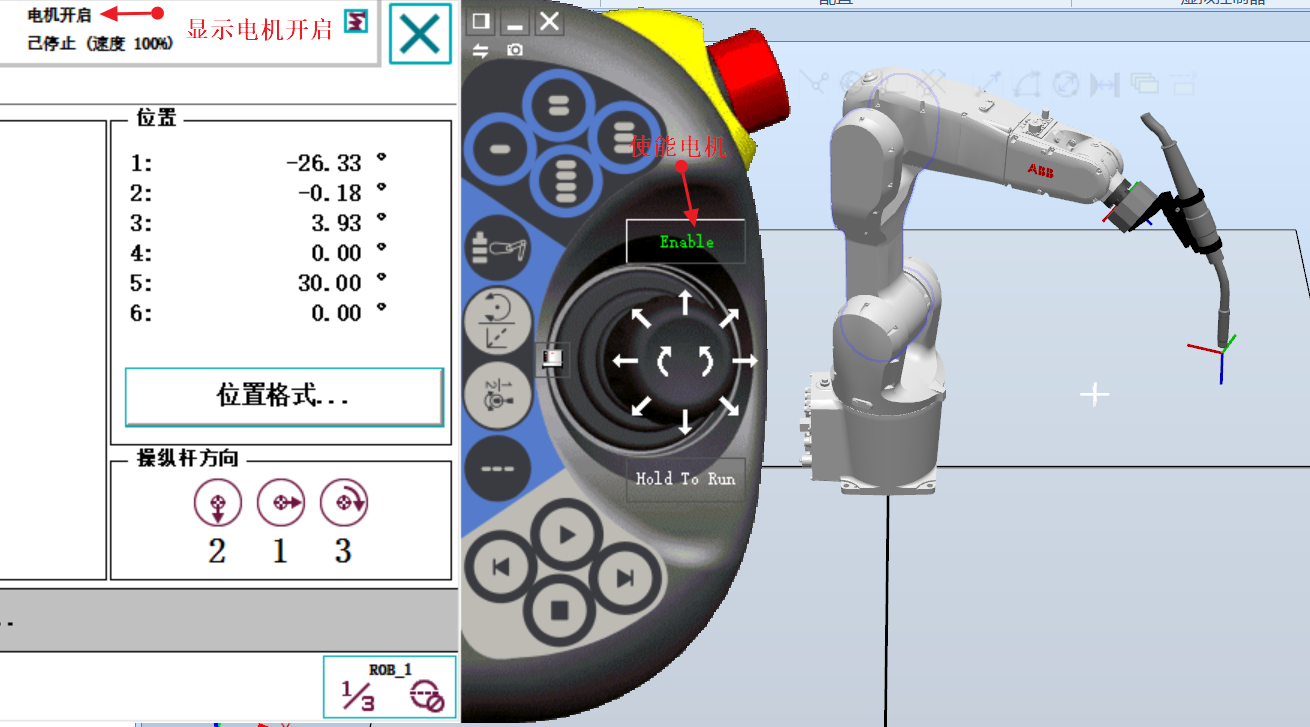
按下Enable开启电机,根据操作杆方向提示,按住摇杆不动,机器人开发仿真运动。
4,5,6轴单轴运动按照同样方式操作。
- 单轴运动
ABB6轴机器人是由6个伺服电动机驱动的,每个电动机驱动一个轴,就是六轴机器人了。
每次手动操作一个关节轴的运动,就称之为单轴运动。单轴运动在进行粗略的定位和比较大幅度的移动时,相比其他的手动操作模式会方便快捷很多。
单轴运动使用时机:
- 将机械单元移除危险位置;
- 将机器人移出奇点;
- 定位机器人轴,以便进行校准;
机器人外轴运送必须为单轴运动。
- 线性运动:
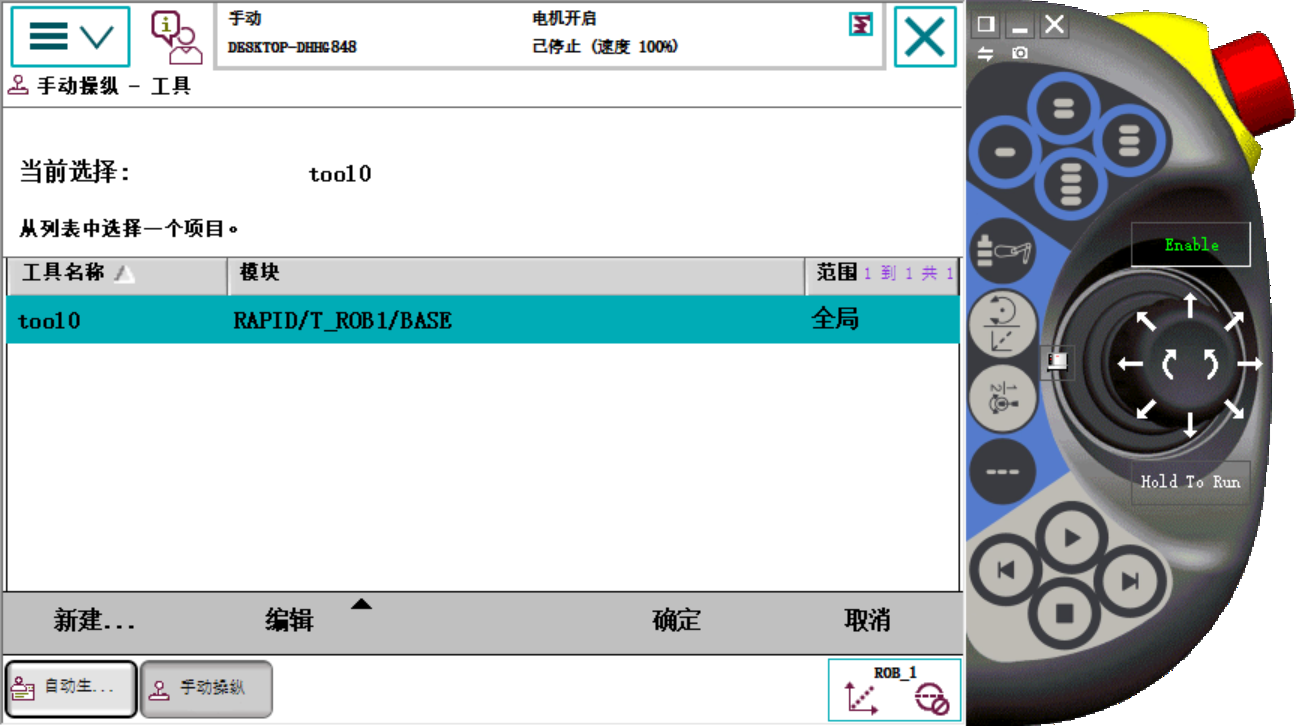
在动作模式中选择线性运动。因为线性运动是指法兰盘上固定的工具的TCP在空间中的线性运动,所以,还需要在工具坐标中选择工具坐标,刚开始只有一个tool0可以使用。
线性运动移动的幅度较小,适合较为精确的定位和移动。
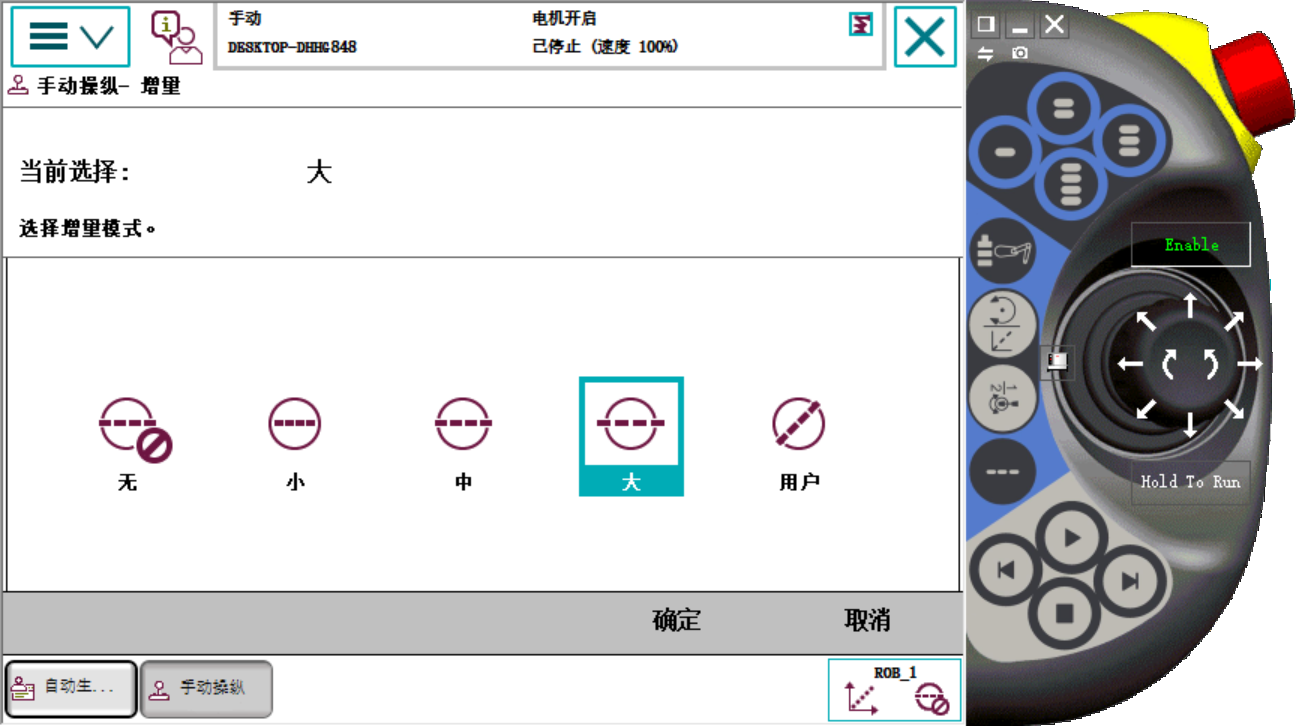
增量模式,是指,每次操纵方向杆1次,机器人运动一步,速率为每秒10步,方便控制幅度部熟练的时候操作(一般选大):
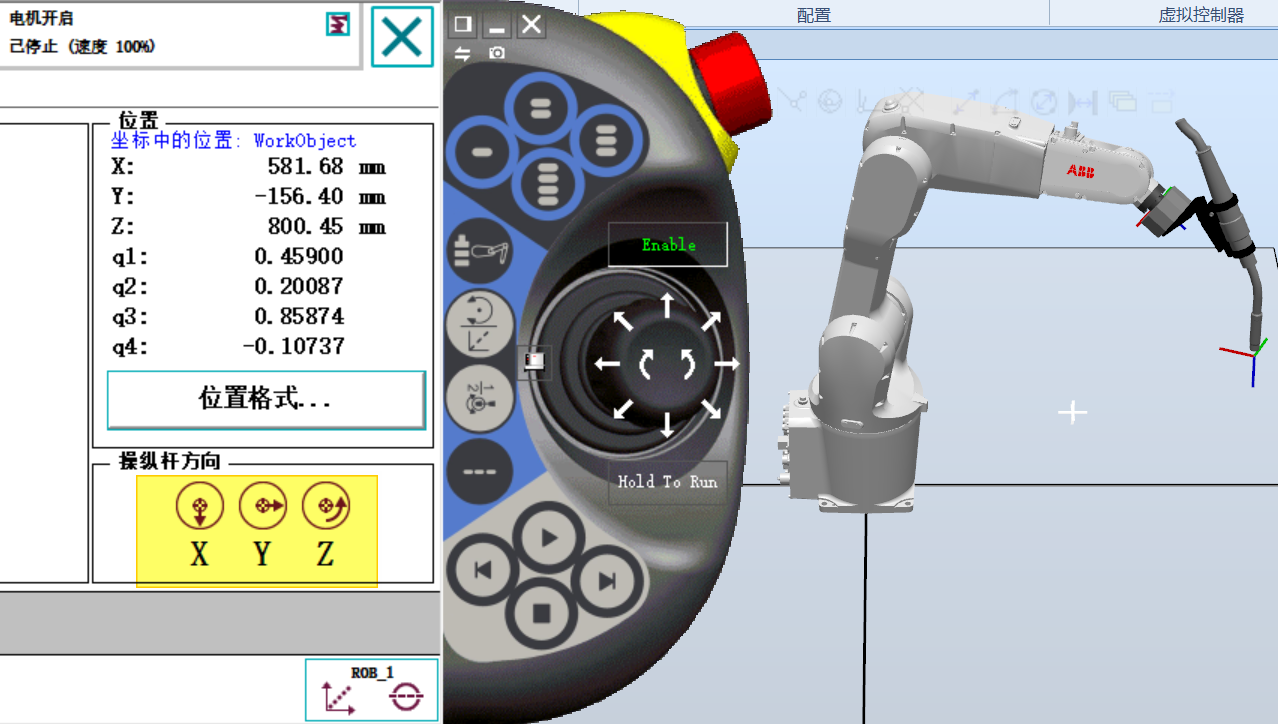
此时操纵杆方向变为X,Y,Z,每操纵一次,工具按照X,Y,Z方向线性运动一个操纵持续时间的步数:
- 重定位运动:
重定位是指机器人第6轴法兰盘上的工具TCP点在空间绕着工具坐标系旋转的运动,或者理解为机器人绕着工具TCP点做姿态调整的运动。
重定位运动的手动操作会更全方位的移动和调整。
- 动作模式切换到重定位;
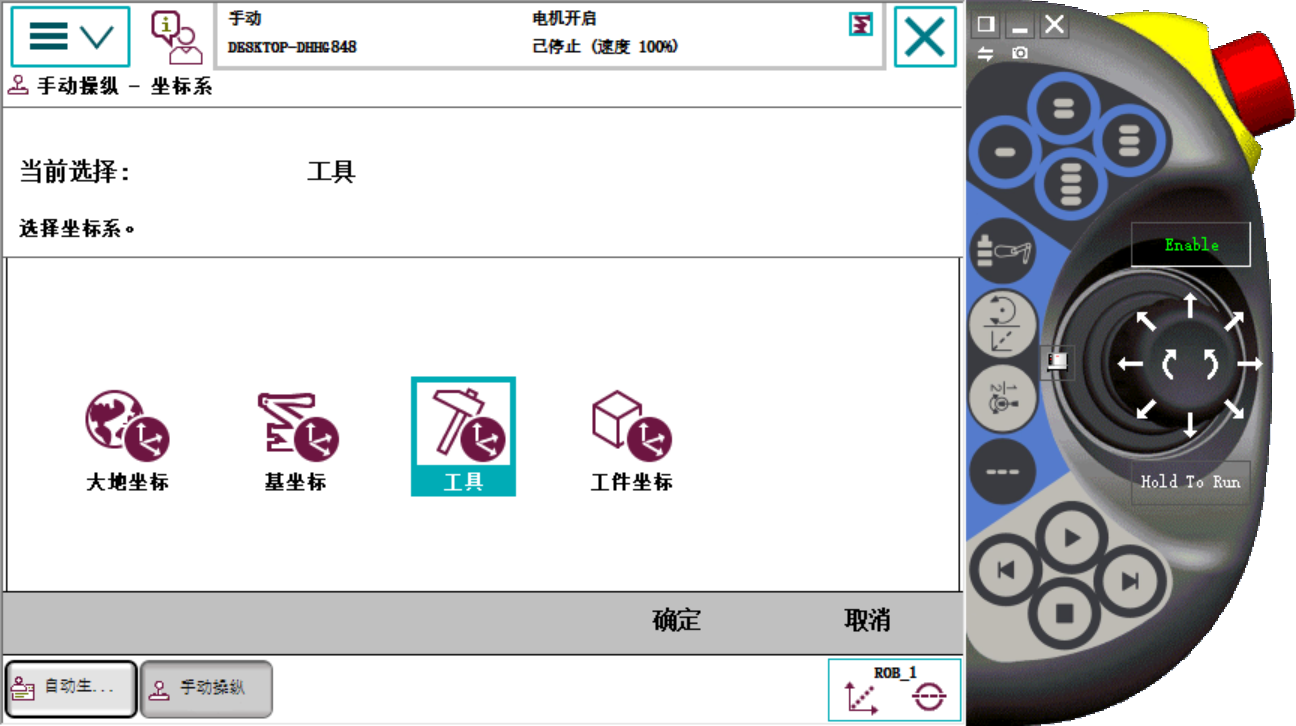
- 选择工具坐标,刚开始只有一个tool0;
- 坐标系选工具;
重定位运动时,必须选择工具坐标。
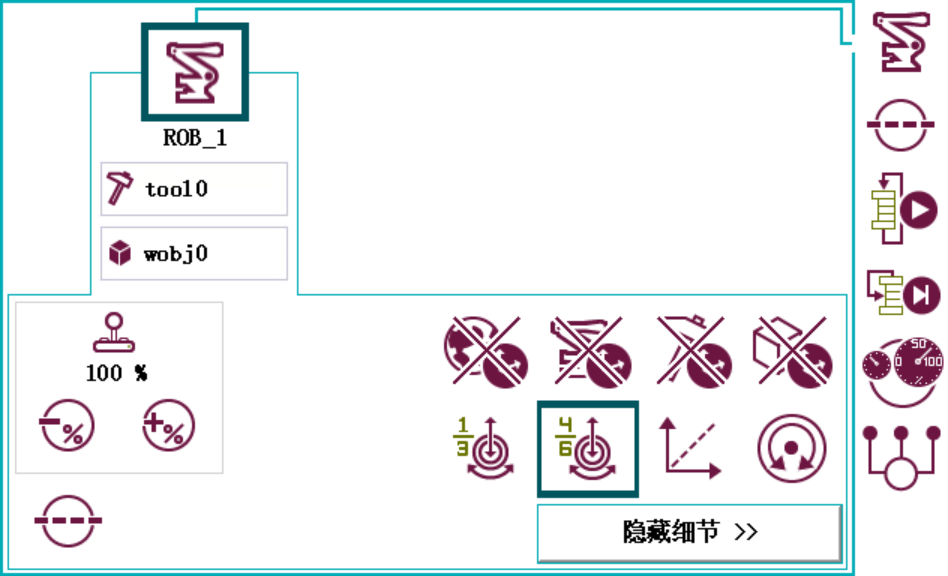
快捷开关:
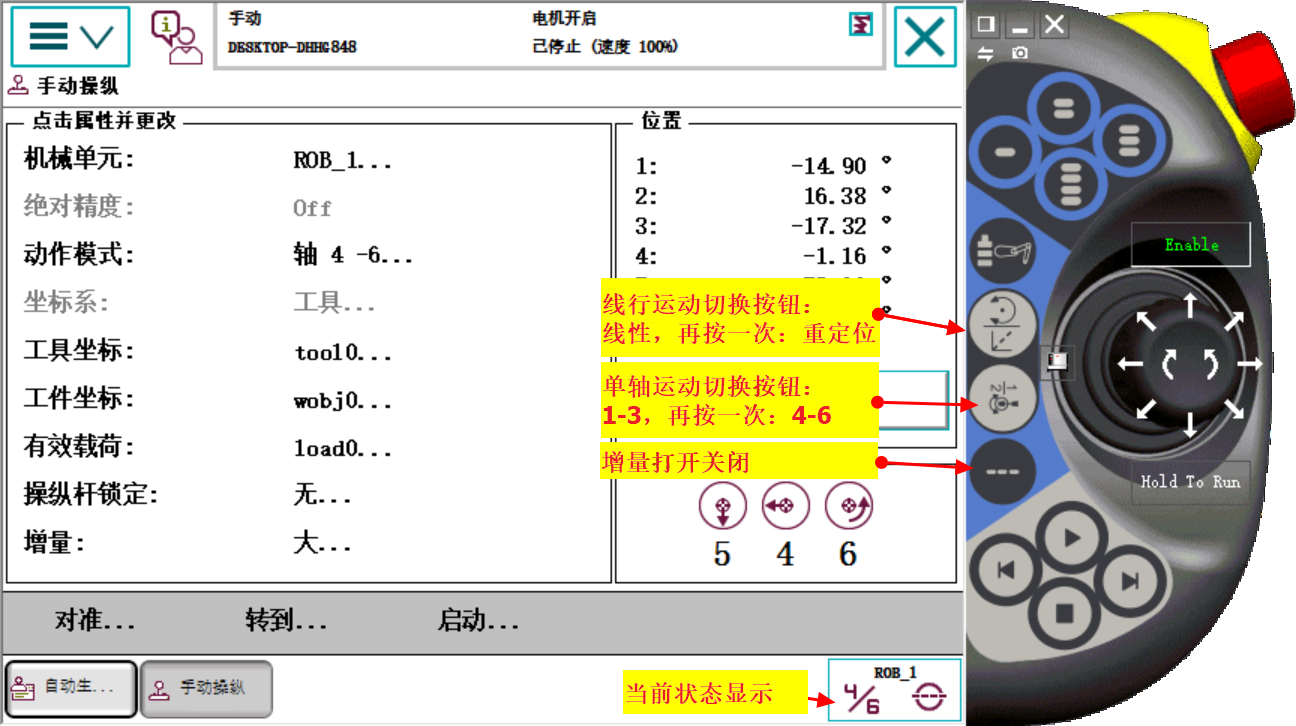
点击屏幕右下角状态显示图标,也可以设置相关状态,以及调整摇杆的控制幅度: