ABB机器人安装
控制柜接线
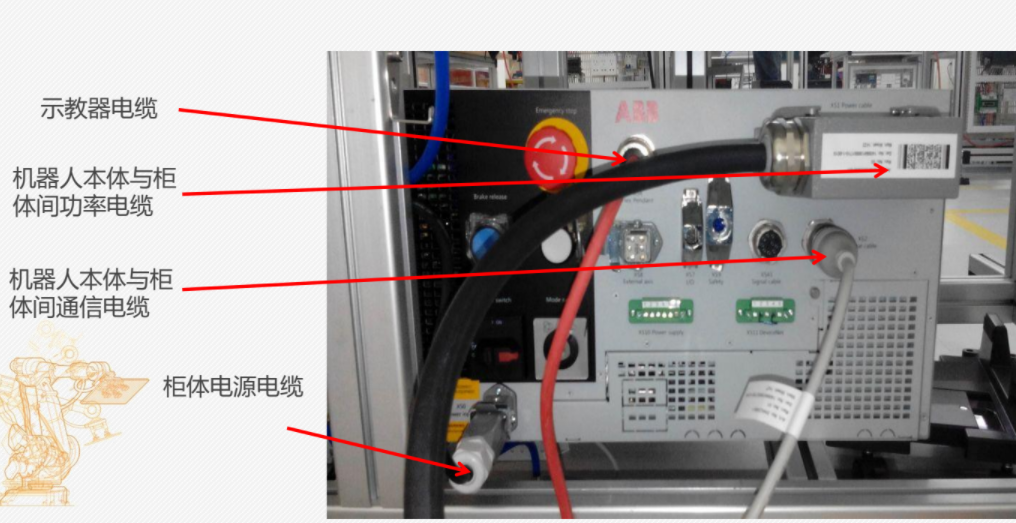
主要是类线:电源线和信号线:
| 线缆 | 控制柜连接点 | 机器人连接点 |
|---|---|---|
| 电源线 | XS1 | R1.MP |
| 信号线 | XS2 | R1.SMB |
实物图参考:

如果有人员受困于机器人手臂下,可以采用制动闸释放按钮,制动闸释放后,可以移动机器人的手臂,但仅有小型机器人方可被人力移动,大型的机器人需要提前使用高架起重机或类似设备将机器人手臂吊起,避免二次伤害。
控制柜连接到手臂底座上,上臂有接口与底座连通:
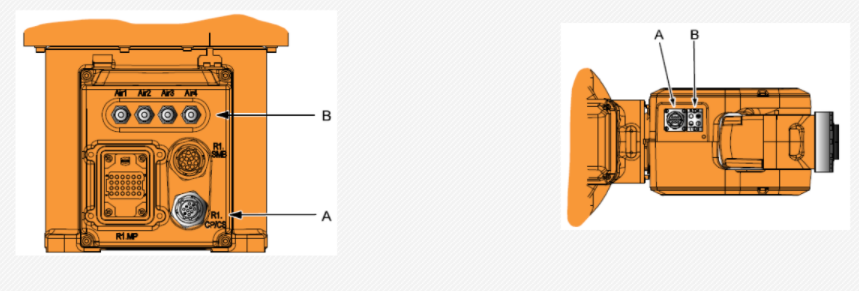
| 位置 | 编号 | 类型 | 参数 |
|---|---|---|---|
| A | 10 | 电力/信号 | 49V/500mA |
| B | 4 | 气动 | 最大5bar 内径4mm |
开机
电源开关打到垂直方向,等待示教器启动完成后再操作: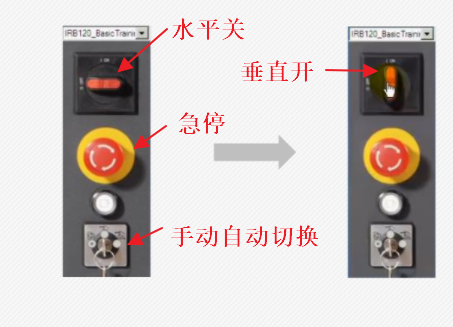
关机
示教器中选择重新启动: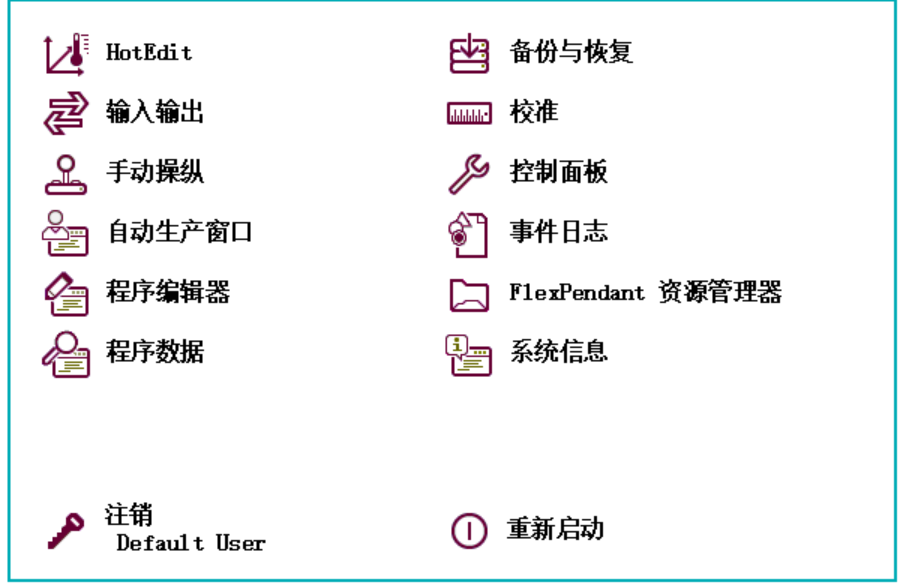
选择高级: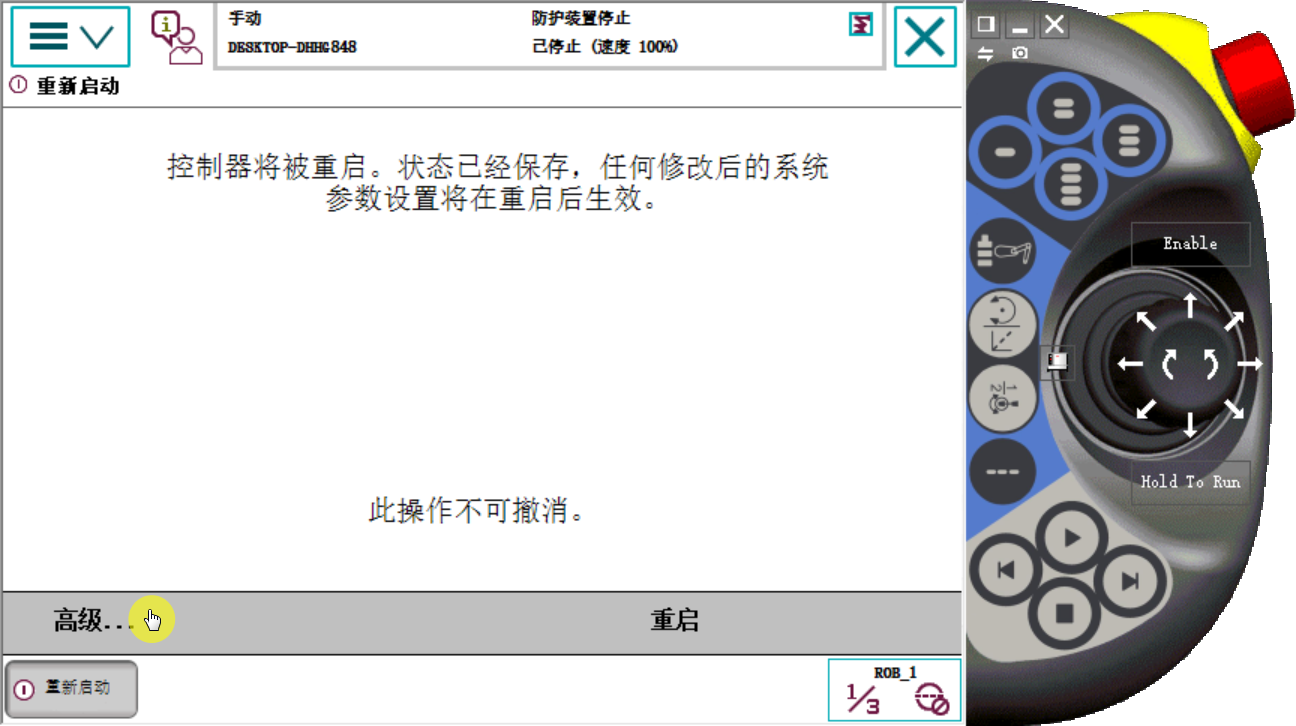
选择关闭主计算机: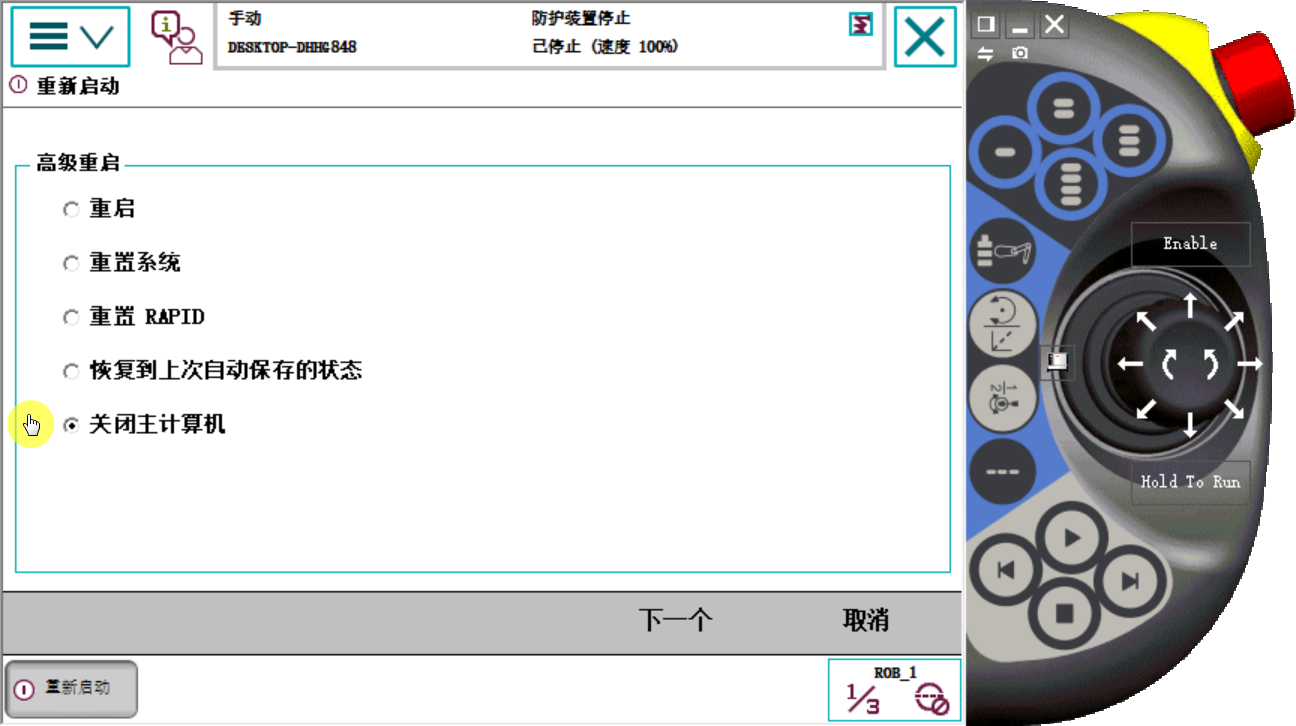
再关闭电源开关,有点类似电脑关机流程。
重新启动
ABB机器人系统可以长时间无人操作,无需定期重启,但以下情况需要重启:
- 安装了新的硬件;
- 更改了机器人系统配置参数;
- 出现系统故障(SYSFAIL);
- RAPID程序出现程序故障;
重启类型如下表:
| 高级重启选项 | 重启类型 | 说明 |
|---|---|---|
| 重启 | 热启动 | 使用当前的设置重新启动当前系统 |
| 重置系统 | I-启动 | 重启并将机器人系统恢复到出厂状态 |
| 重置RAPID | P-启动 | 重启并将用户加载的RAPID程序全部删除 |
| 恢复到上次自动保存的状态 | B-启动 | 重启并尝试回到上一次的无错状态,一般出现系统故障时使用 |
菜单主界面的重新启动为热启动:使用当前的设置重新启动当前系统: