RAPID程序示例及自动运行
示例程序控制要求
机器人先到达一个设定的点,然后在另外两个设定的目标点之间来回走3遍。
建立程序模块与例行程序
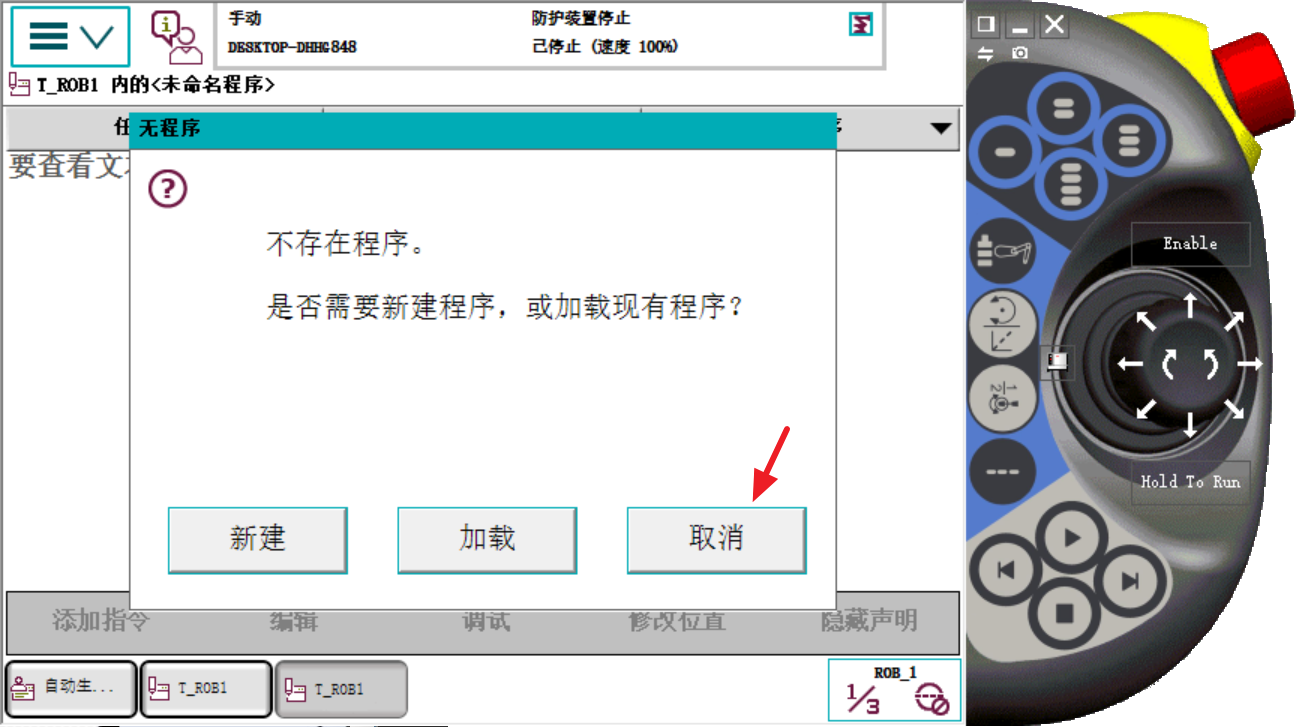
打开程序编辑器,如果提示不存在程序,先单击取消进入模块列表:
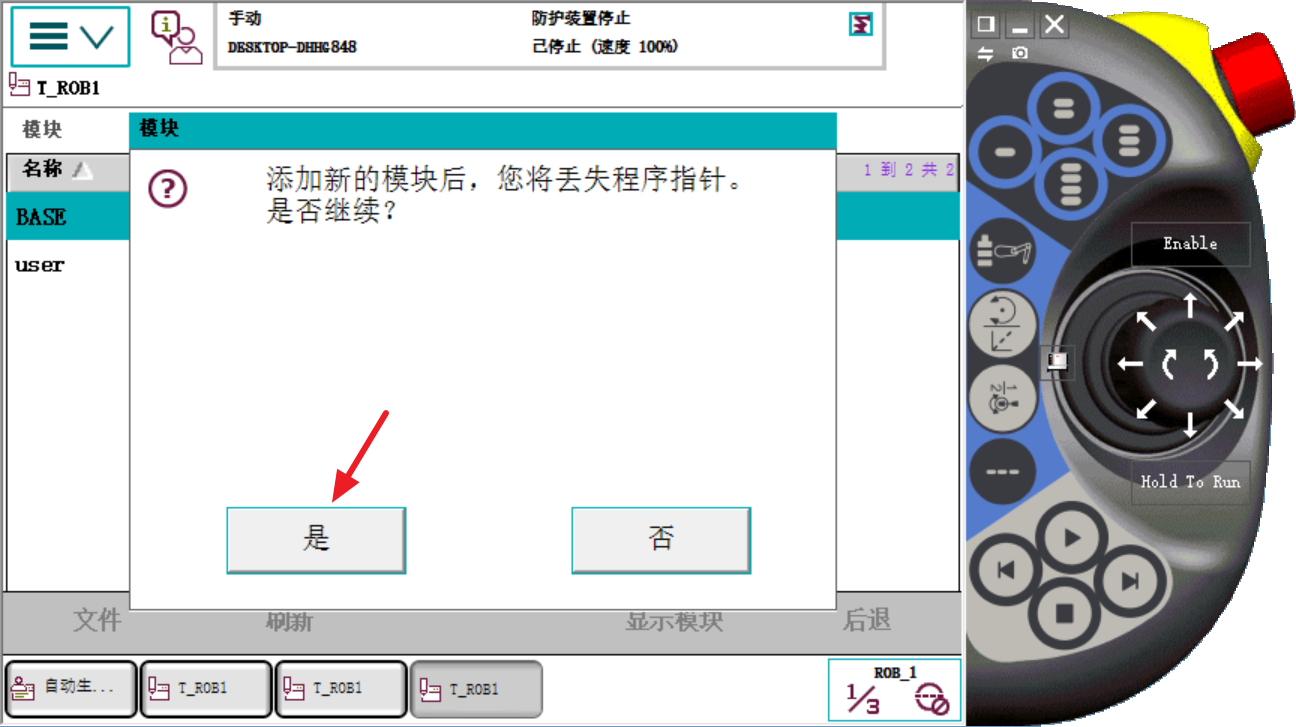
通过文件/新建模块,新建一个名为Module1,类型为Program的模块:
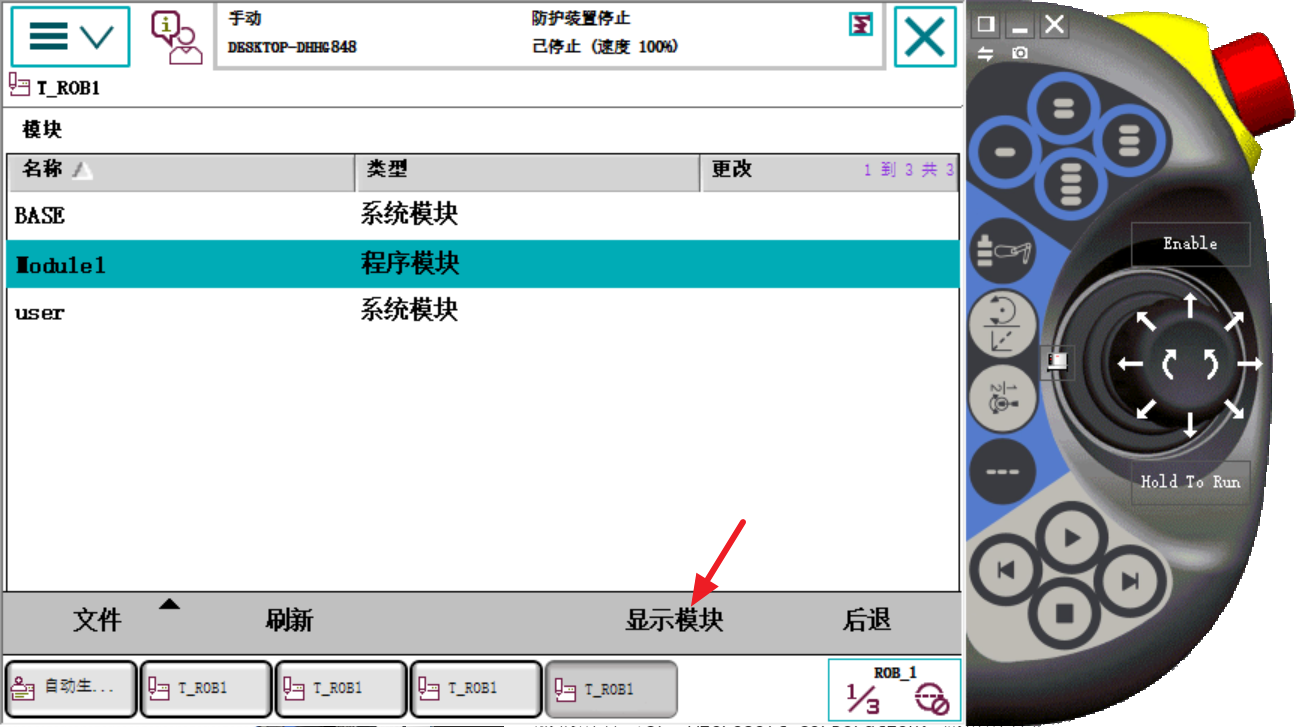
单击显示模块:
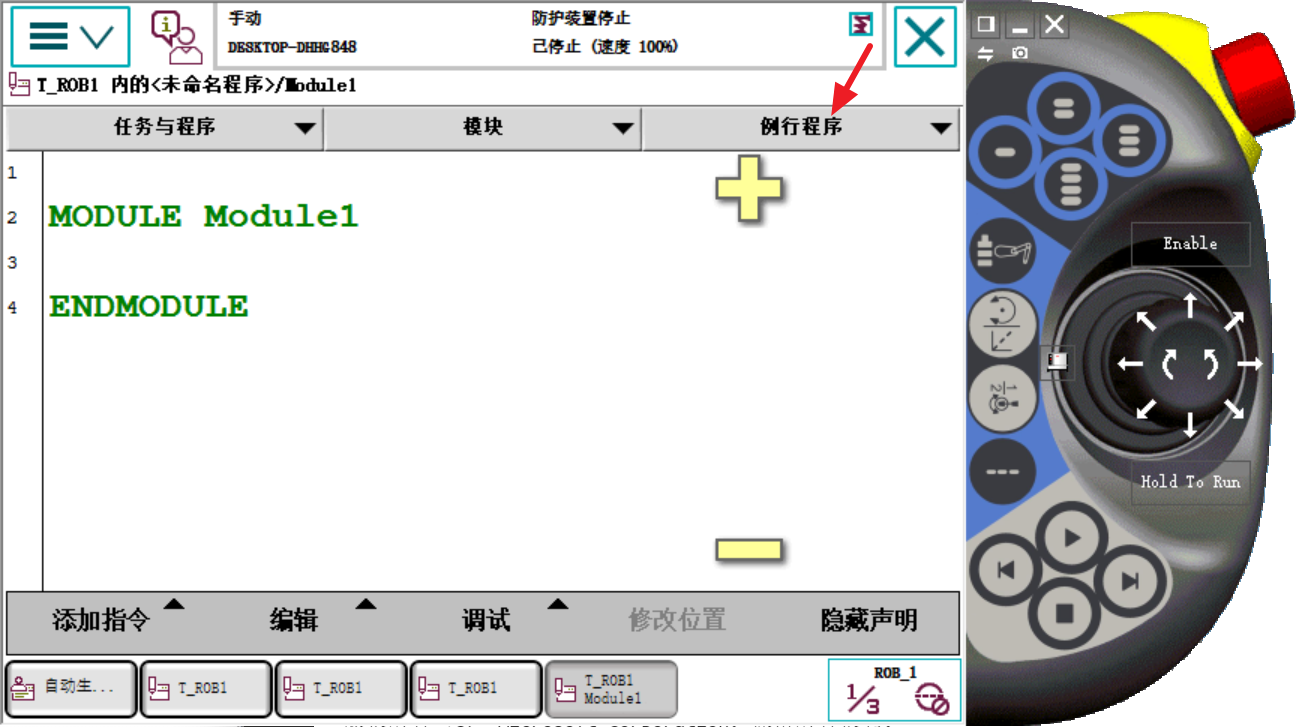
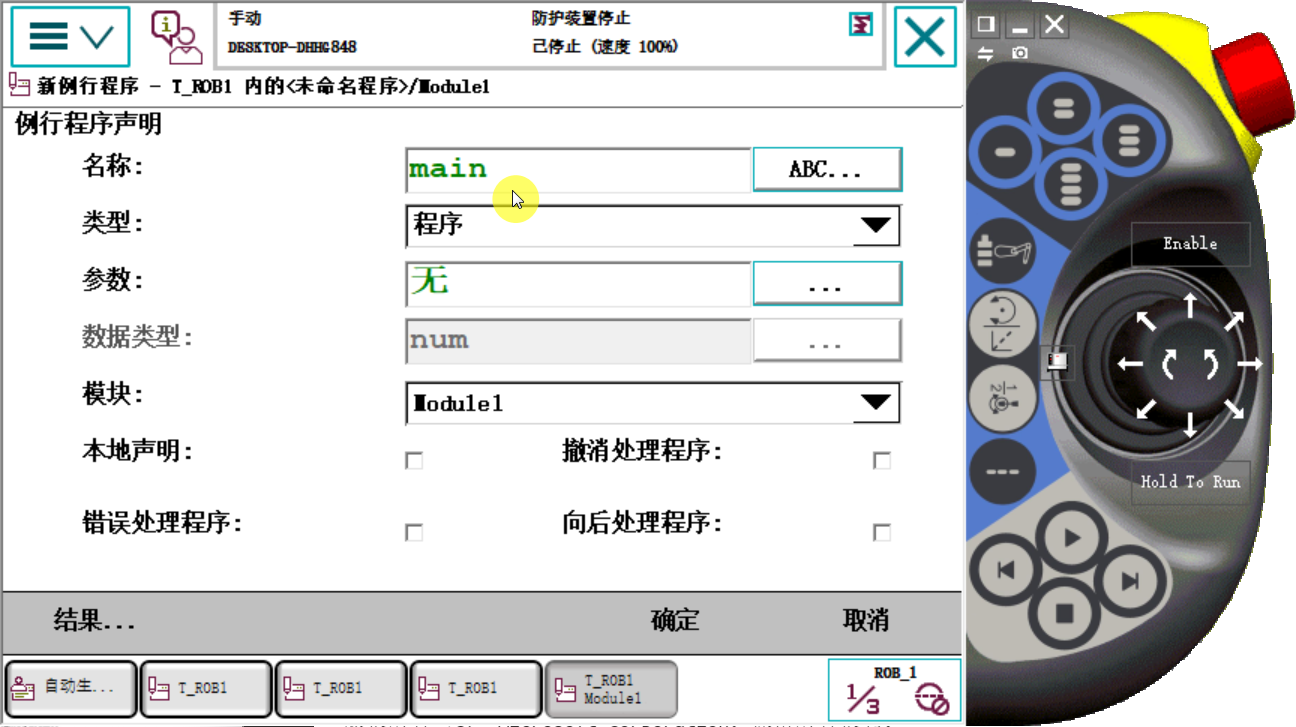
单击例行程序,通过文件菜单,新建例行程序:
建立一个主程序,名称为main,确定:
建立程序数据
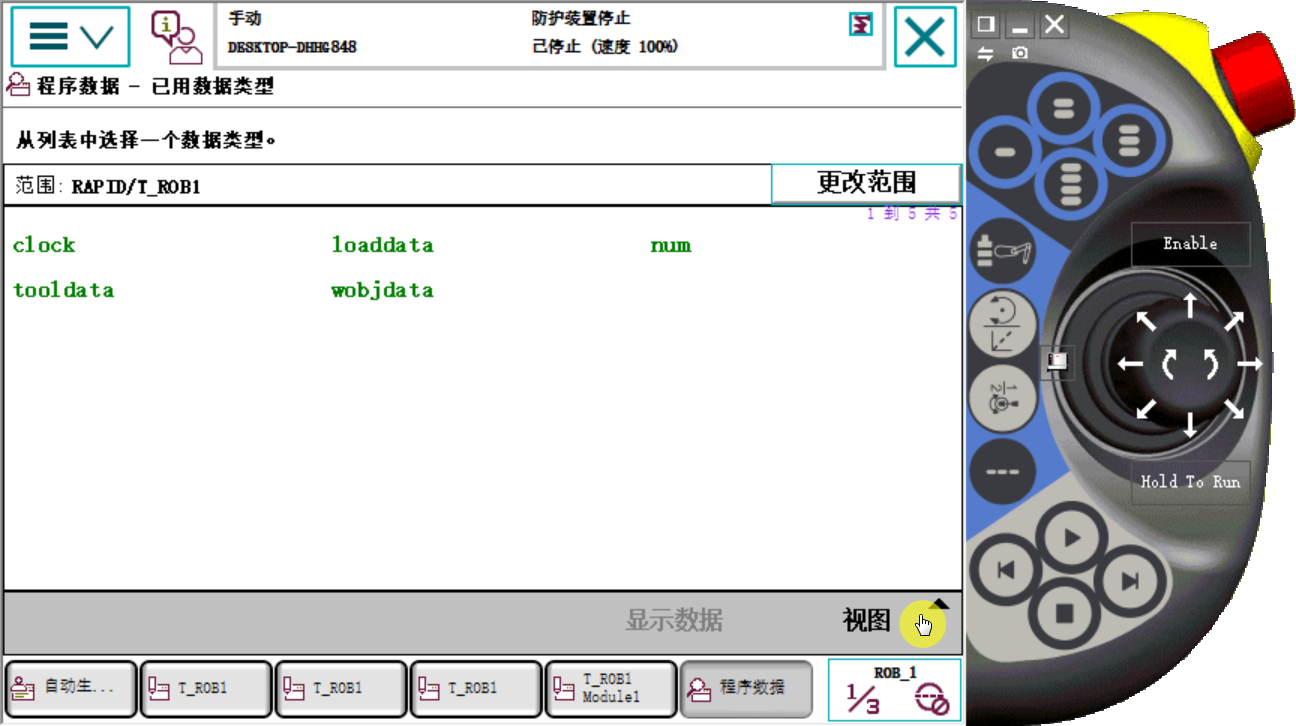
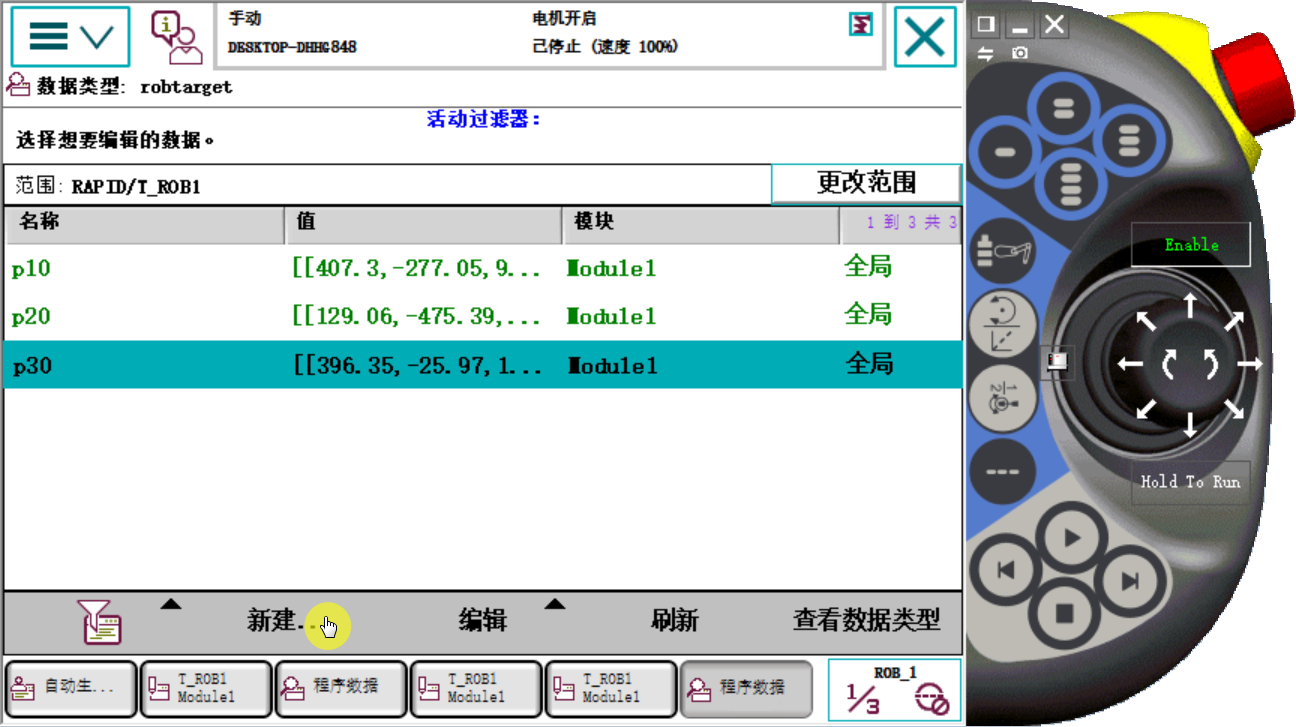
新建一个类型为robtarget的程序数据,注意,如果看不到这个数据类型,切换视图到全部数据类型:
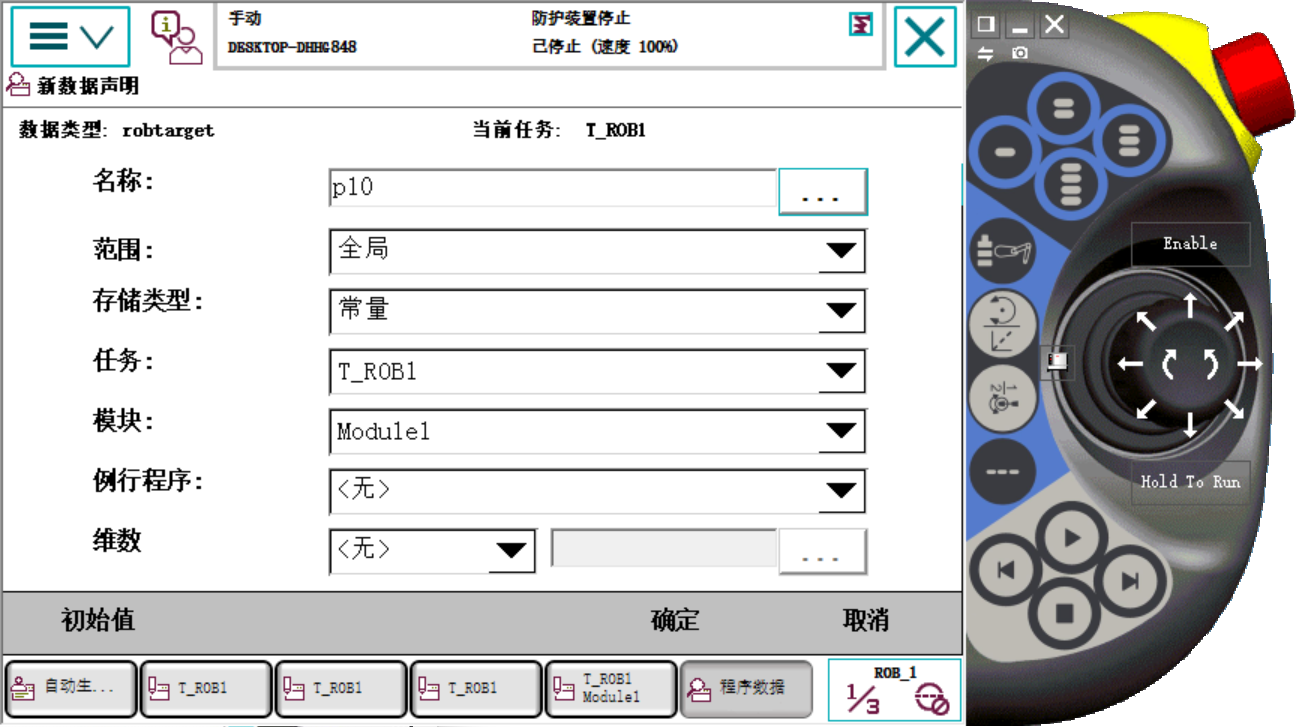
新建第一个目标运动位置数据,命令为p10,范围全局,存储类型为常量(实际默认就是这个设定,这可能也是RAPID内置如此多的数据类型的原因吧:方便示教器操作):
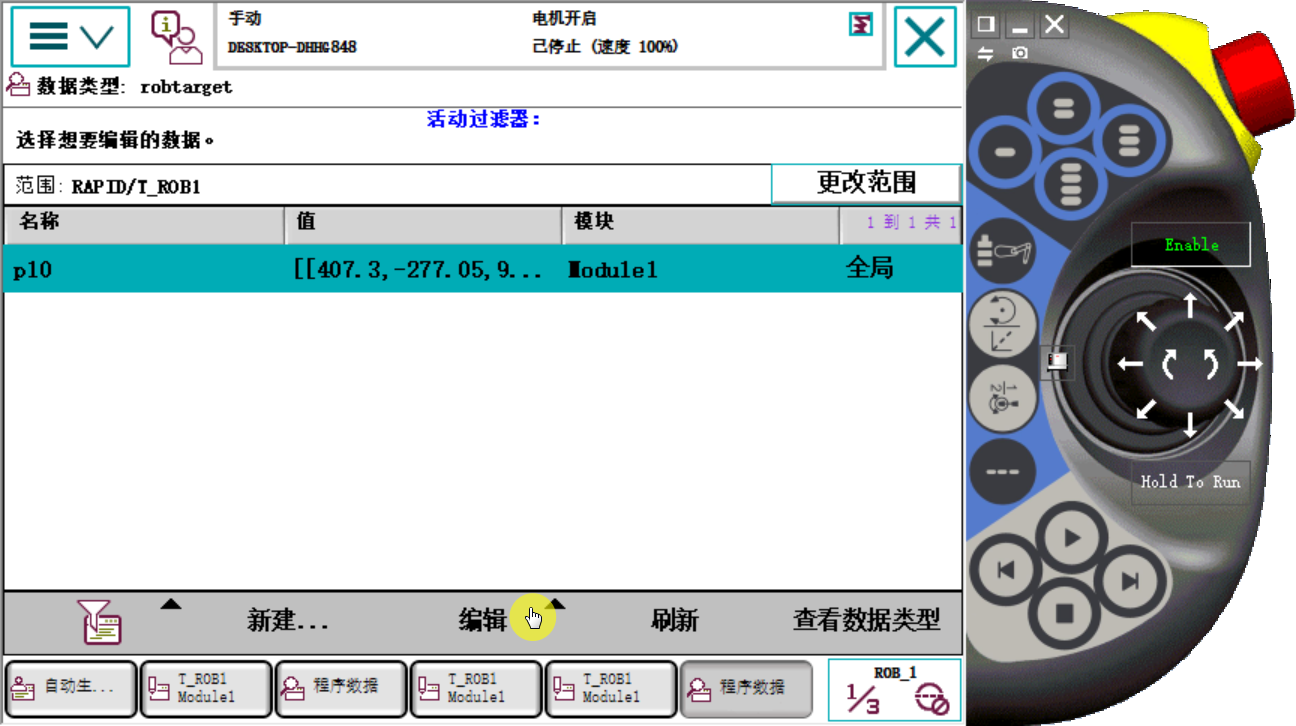
将手臂移动到一个初始位置,在示教器中单击编辑修改此位置数据(建议配合RobotStudio仿真环境测试,见dusty@之前的文章):
再新建3个目标位置数据 p20,p30:
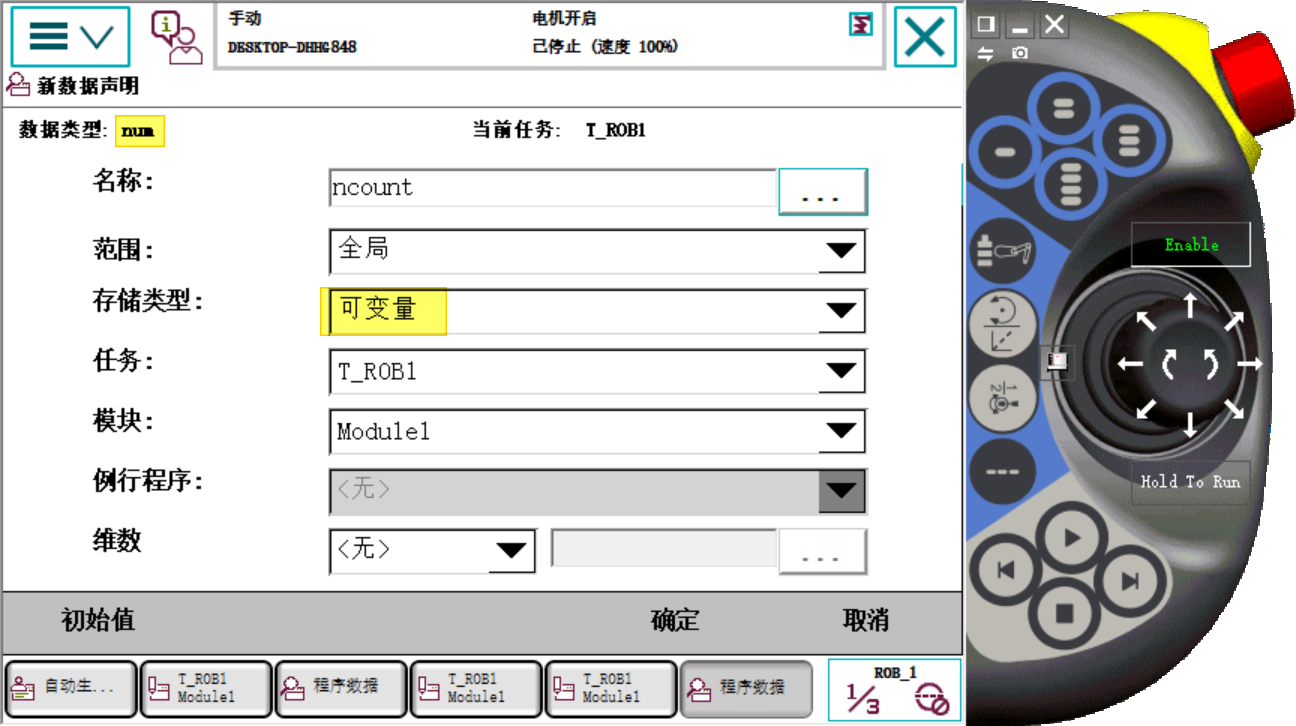
再新建一个数字类型num的数据,并设定为全局可变:
Note:
- 不同的数据类型是分类放到不同的数据列表中的,同一个列表界面新建的默认是同一种数据类型,要到数据类型列表中选择num;
- 区分变量与可变量;
添加指令
在主程序main中添加一行赋值指令:
1
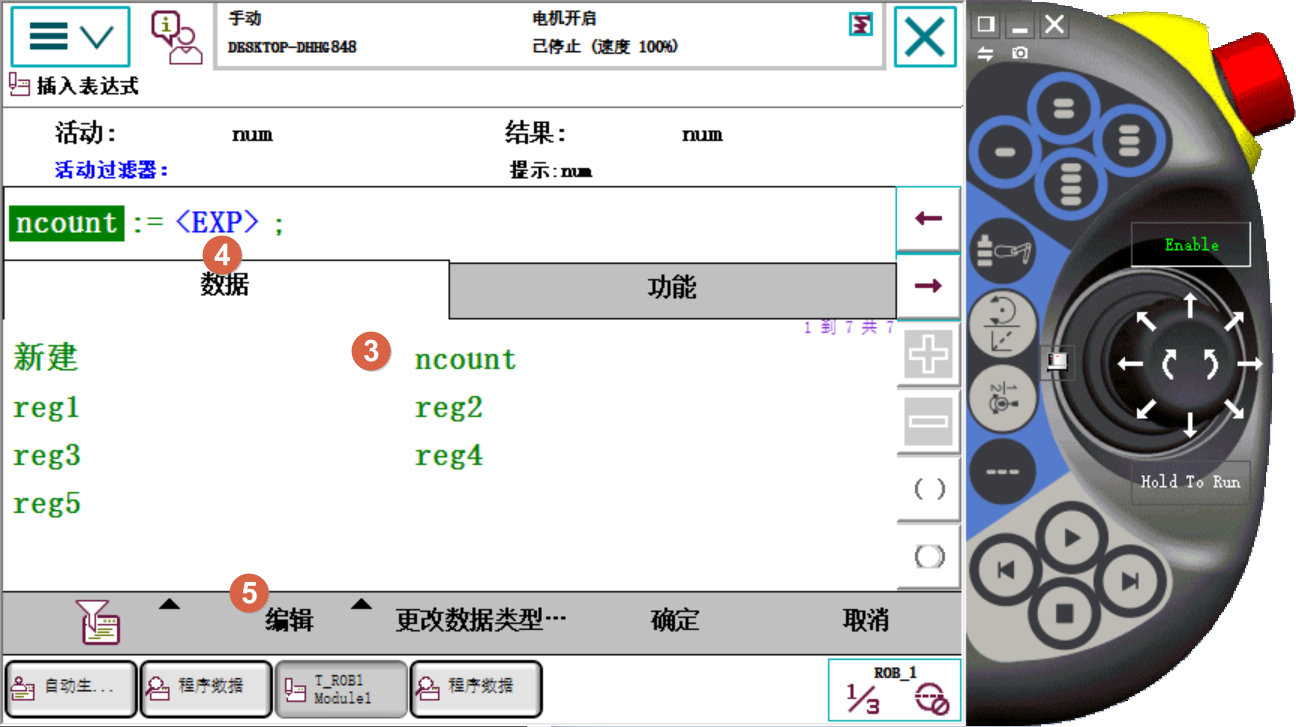
ncount := 0;
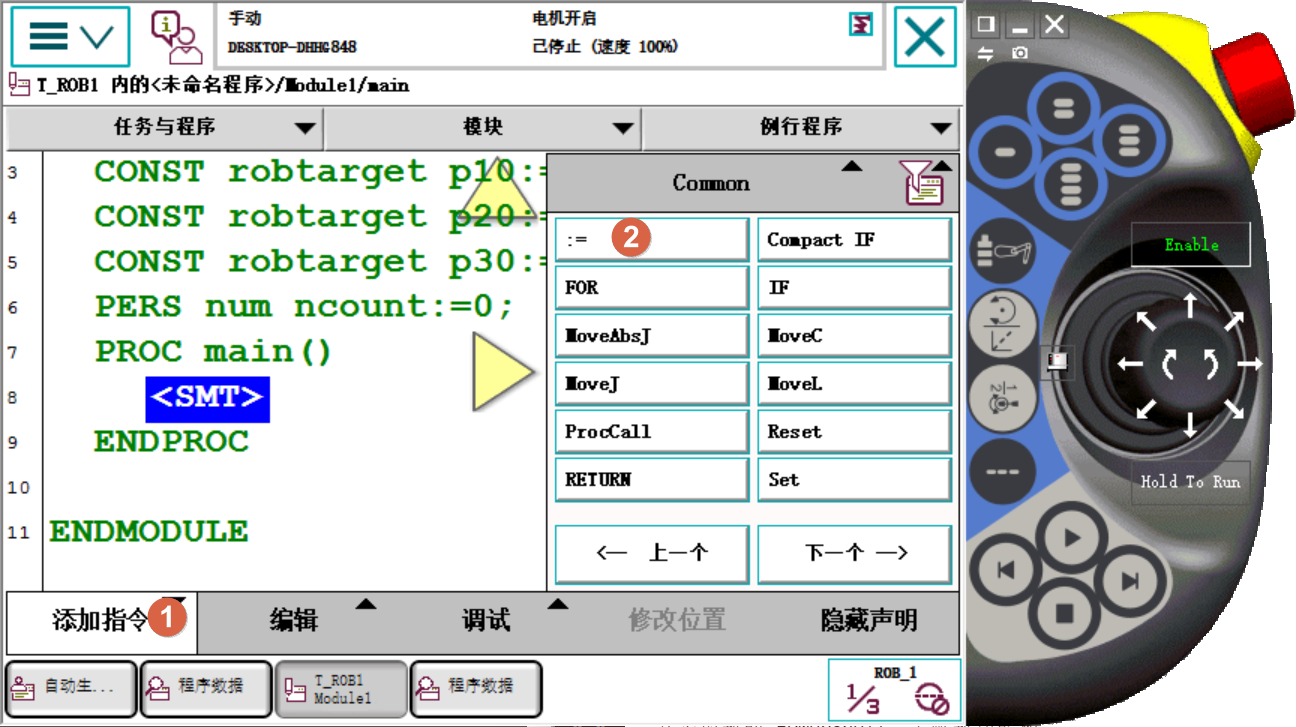
单击EXP,编辑,选择仅限选定内容:
继续添加两条运动指令 MoveJ:
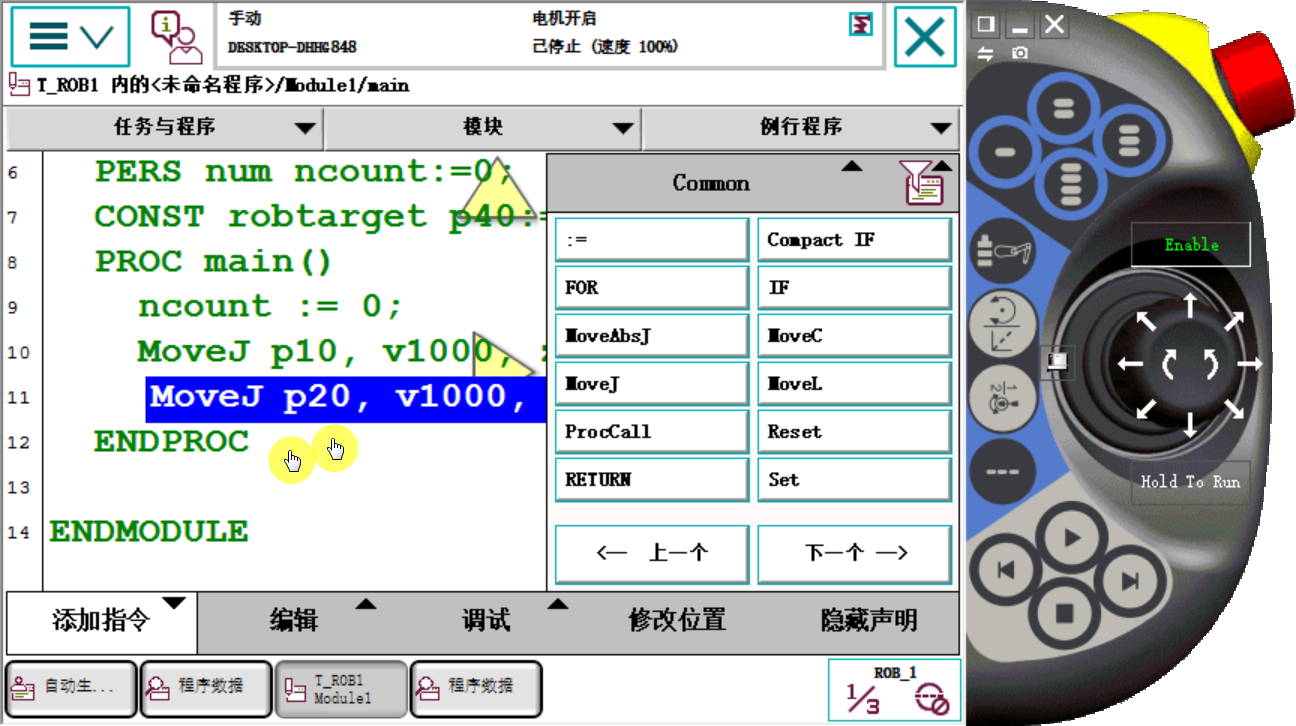
添加指令后,直接点击要修改的位置进行修改。
添加循环语句WHILE,条件判断语句IF,ELSE:
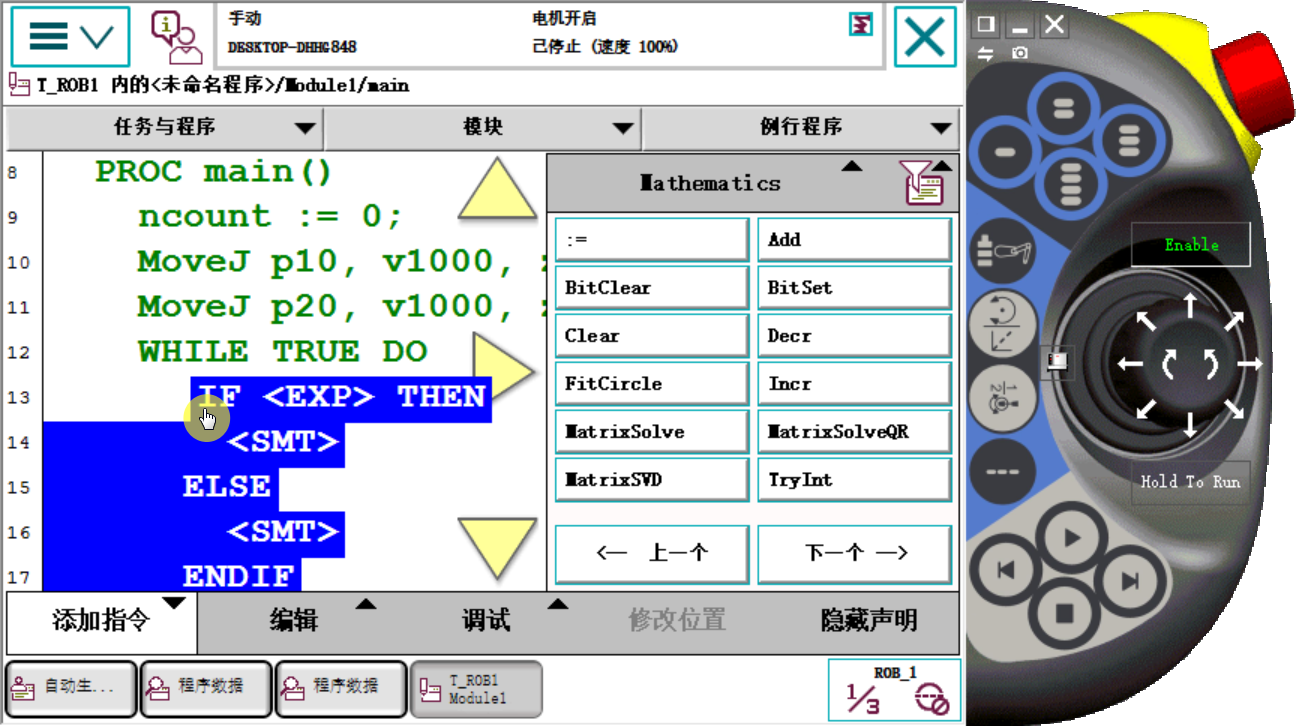
注意,添加ELSE是点击IF后再弹出的界面添加。
最终的程序:
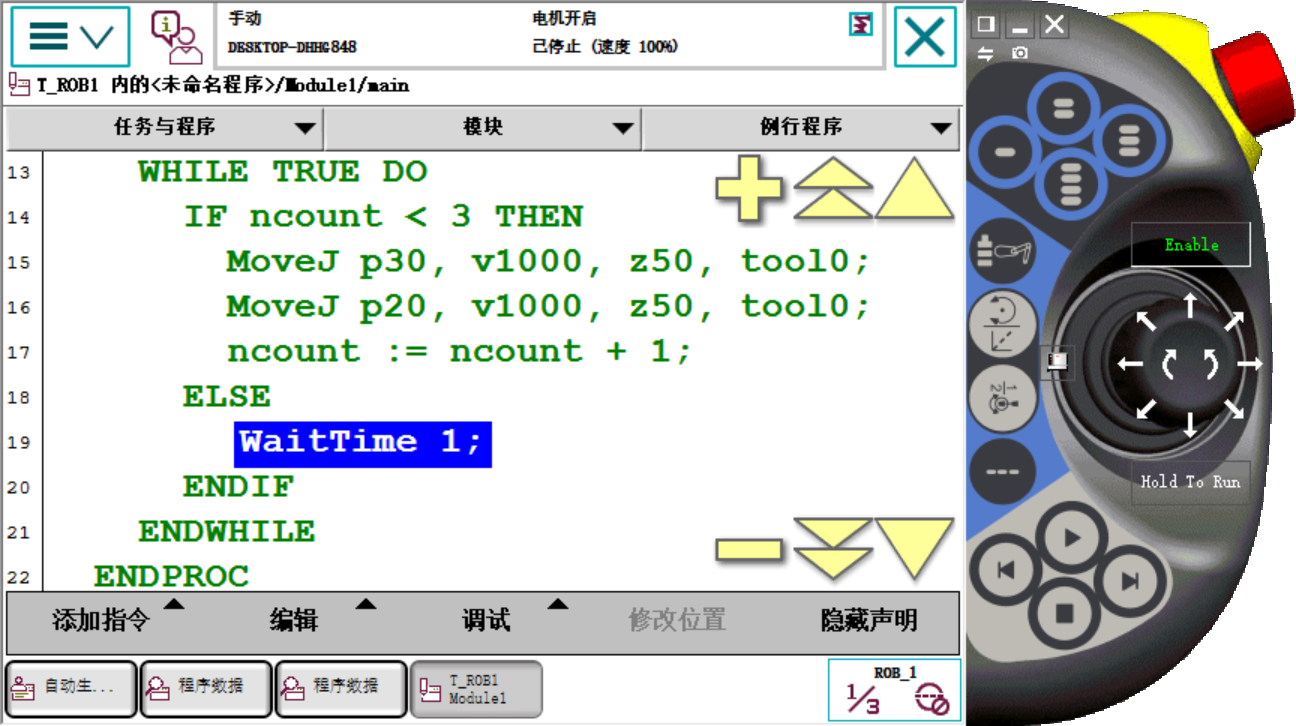
WaitTime相当于Arduino的delay,1的单位是秒;
运行程序:
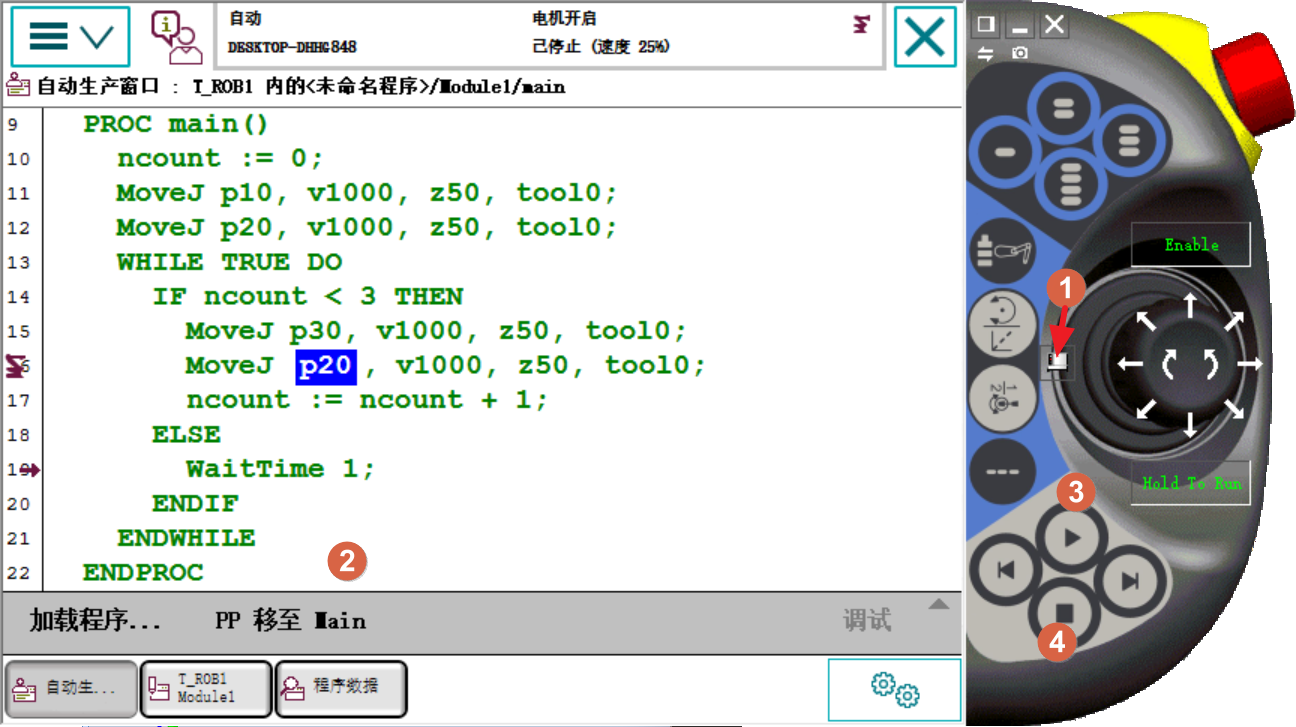
- 切换到自动模式;
- 在自动生成川口,将PP(指针)移至Main;
- 点击运行按钮;
- 运行结束点击停止按钮;
Note:
示教器的界面最多可以同时打开6个串口,在下方可以方便切换。
- 实际效果:
Summary
- 模块Module是RAPID的灵魂,先建立Module,再在其下建立例行程序main和程序数据,程序数据是在编辑例行程序的时候会用到的参数;
- PP函数指针指向Main,依顺序运行RAPID程序,直到结束;