ABB RobotStudio 练习环境搭建
下载最新版本的RobotStudio
https://new.abb.com/products/robotics/robotstudio
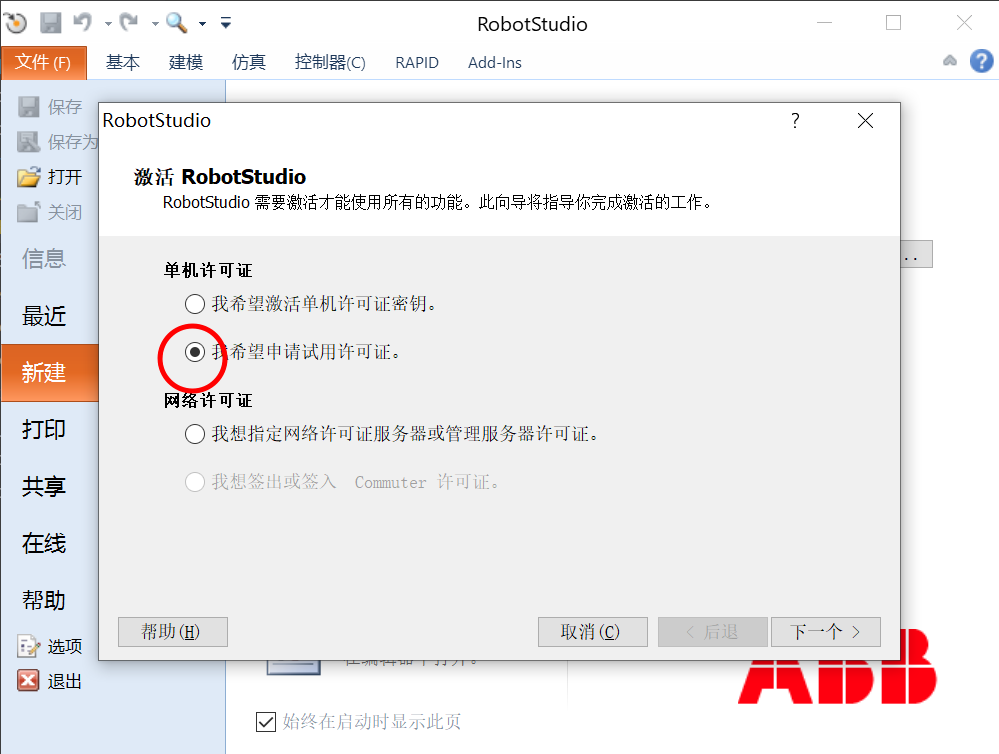
激活
选择”希望申请使用许可证”:
选择”RobotStudio Premium”:
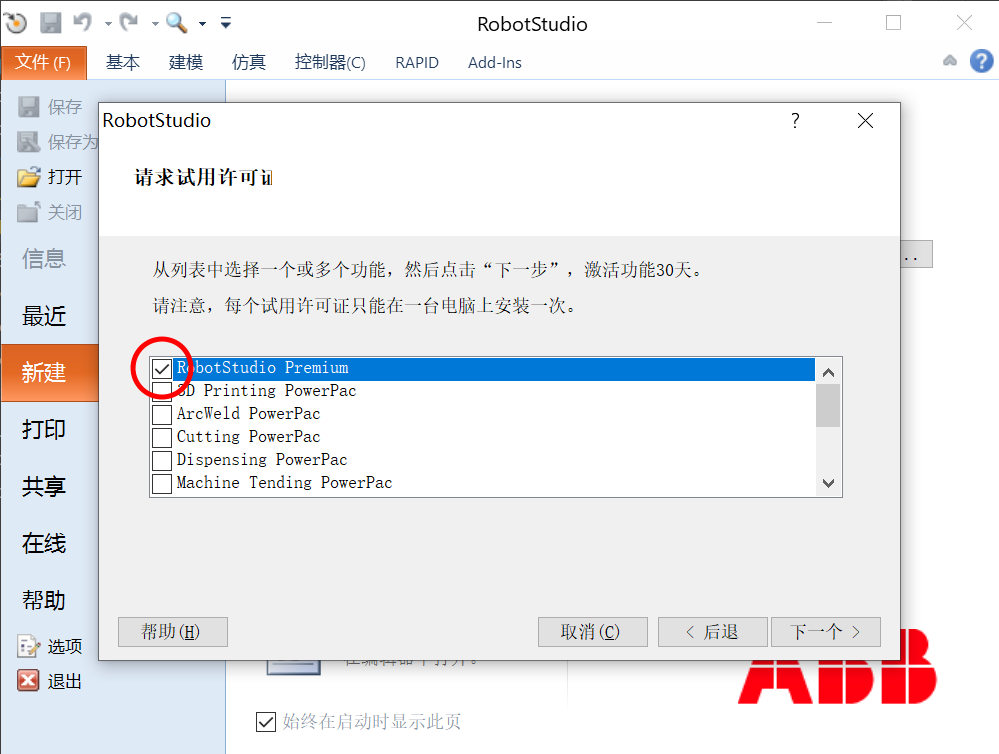
点击”完成”,提示重启激活:

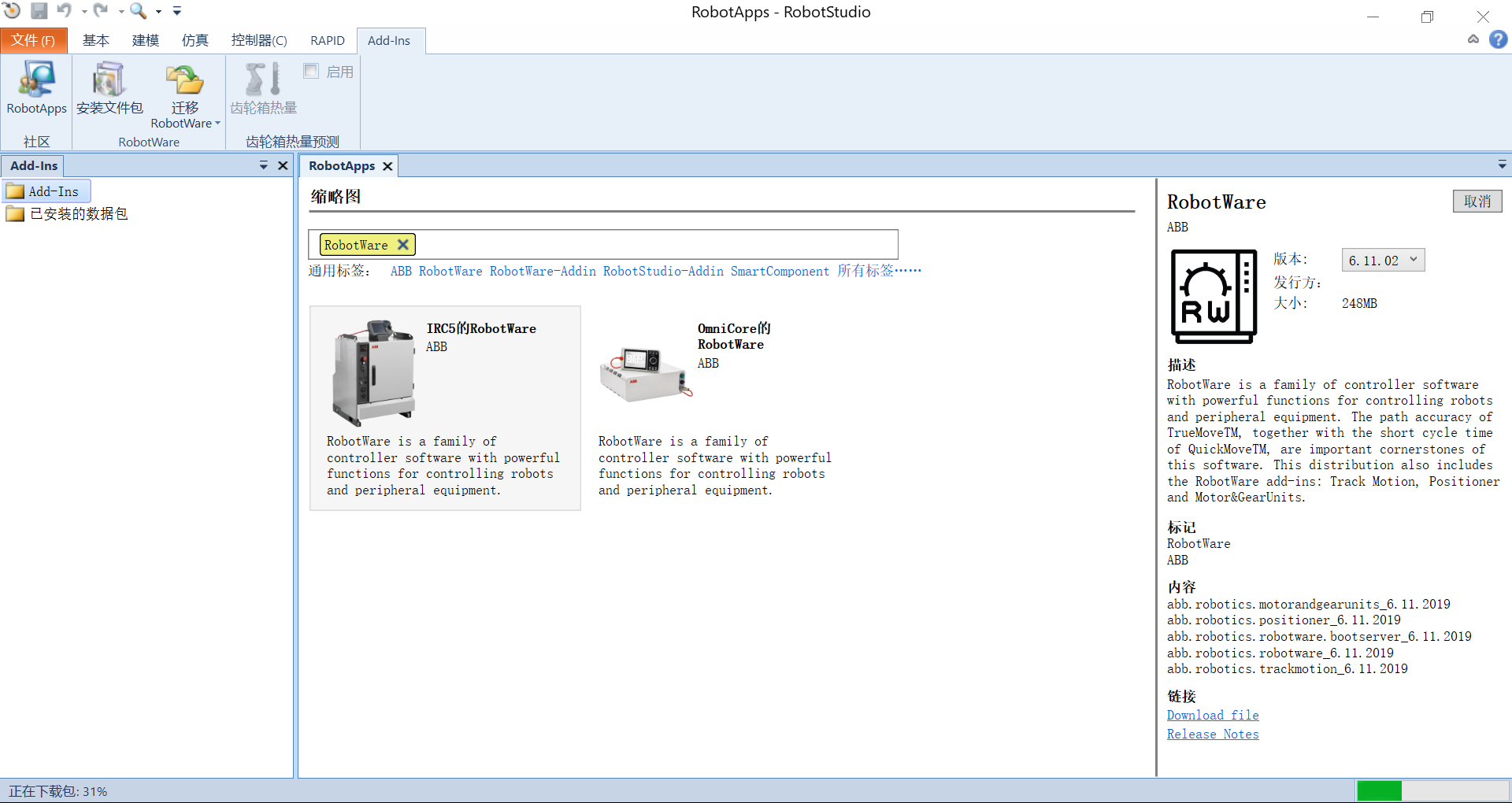
目前只有30天的试用期。安装Robotware:
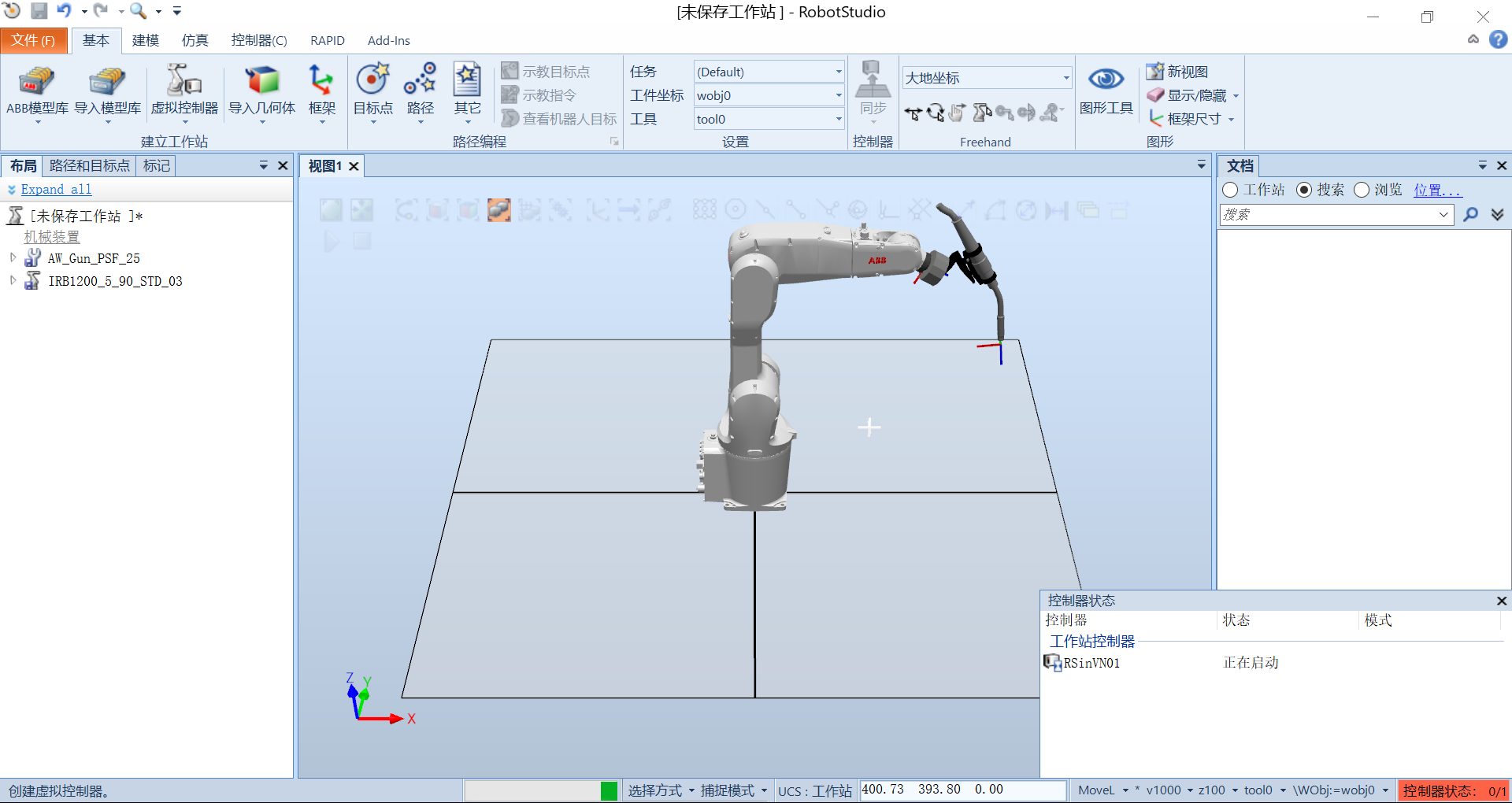
创建工作站:

导入ABB模型库:
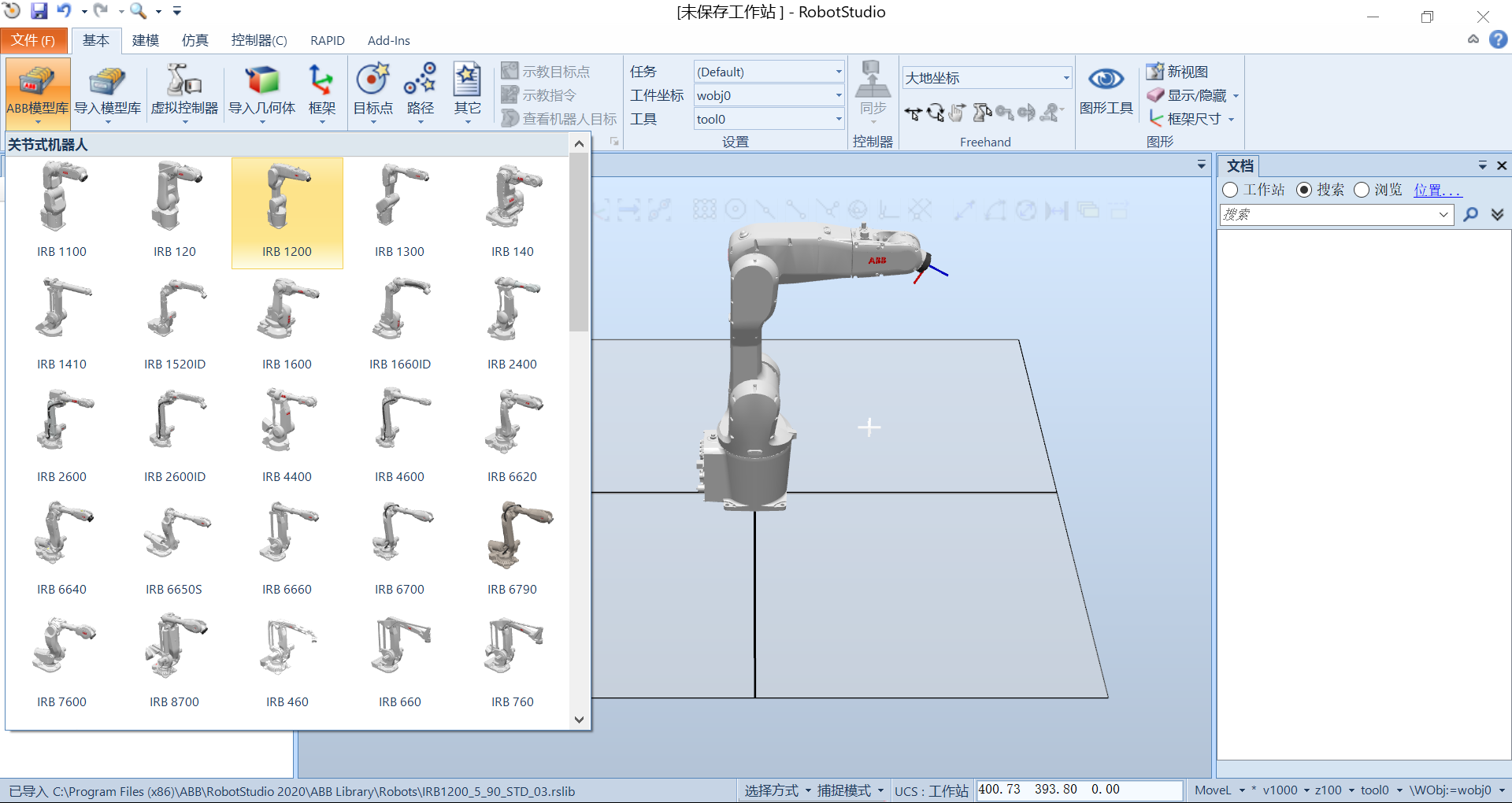
导入模型库:
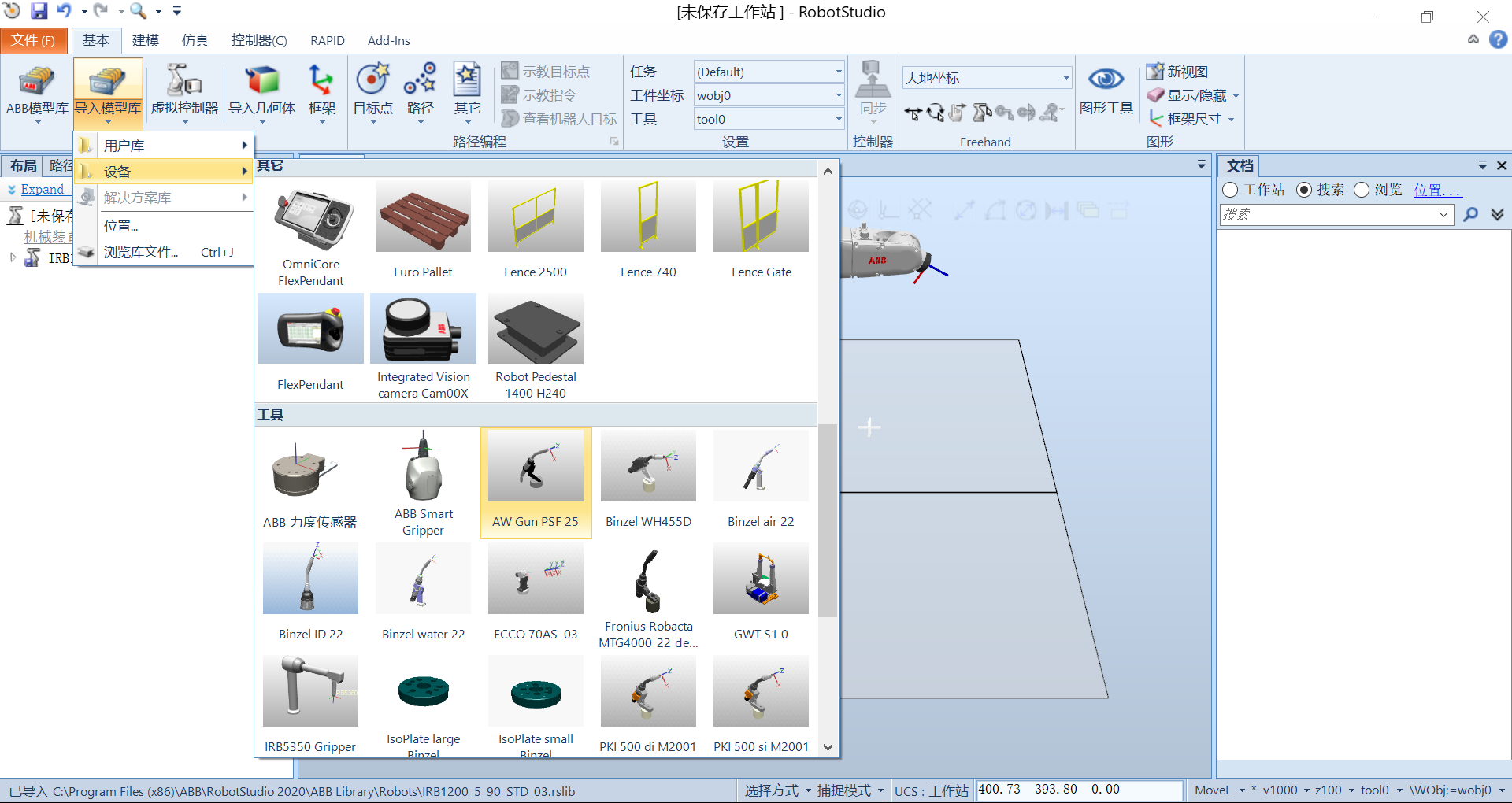
添加模型到手臂:
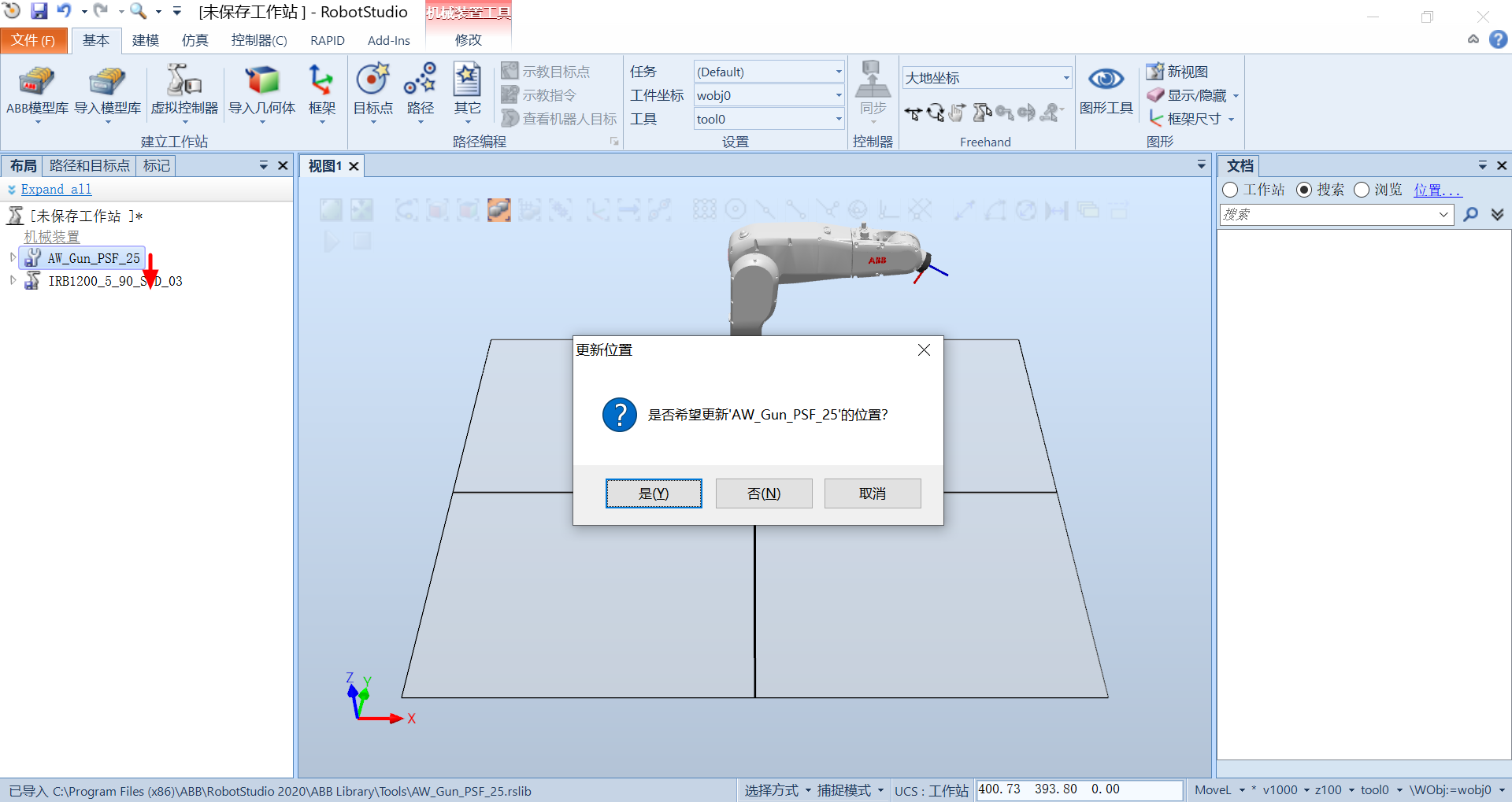
- 直接拖动模型到手臂上即可安装
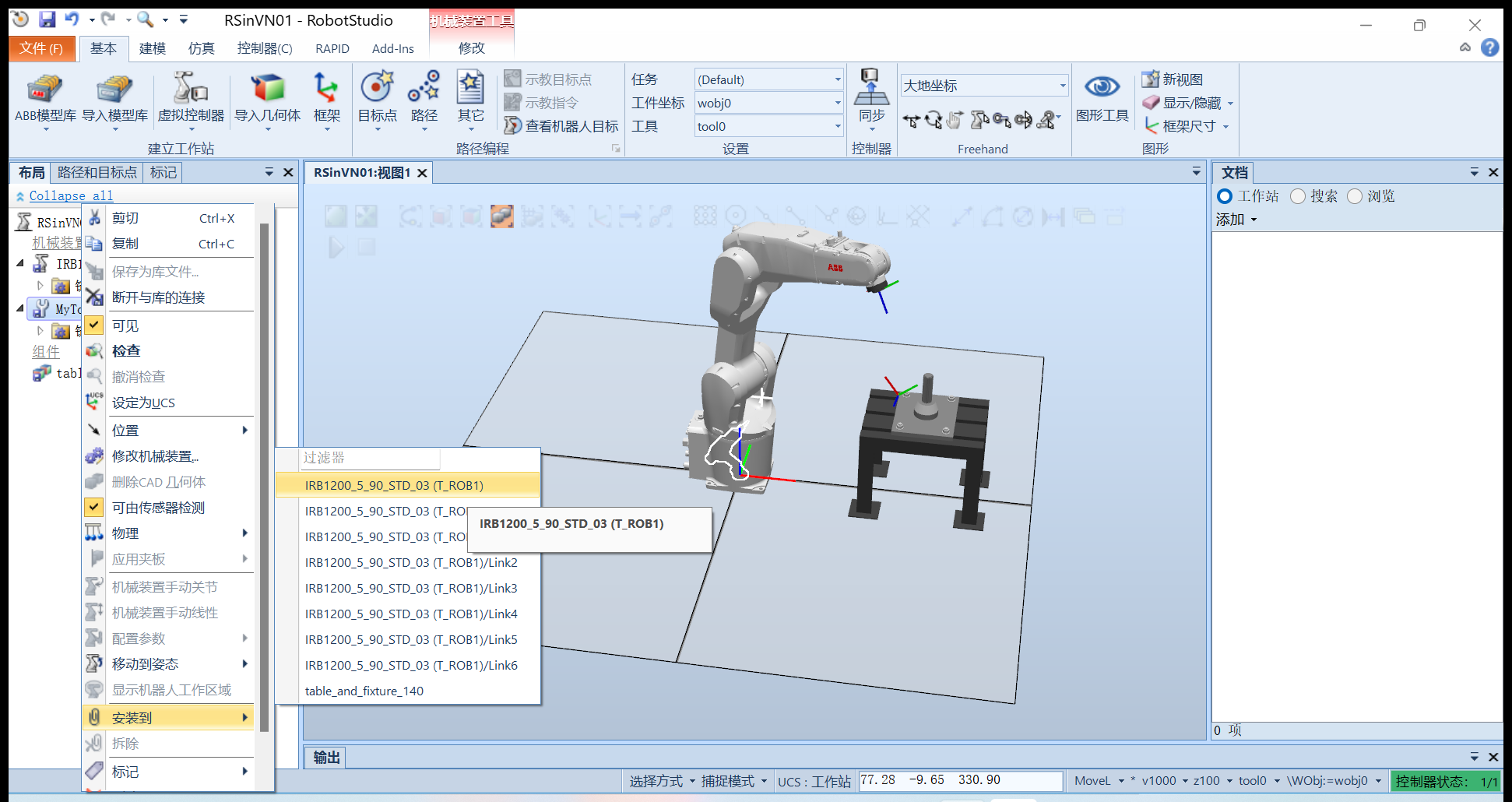
- 或者单击要选择的模型,然后在左侧的布局选项卡中,右击模型,选择安装到手臂:
选择的模型有些可以直接安装到之前布置好的基座上,默认是放置到手臂基坐标原点,有些小模型可能会隐藏在手臂基座里面,可以通过左侧布局选项卡里选择查看。
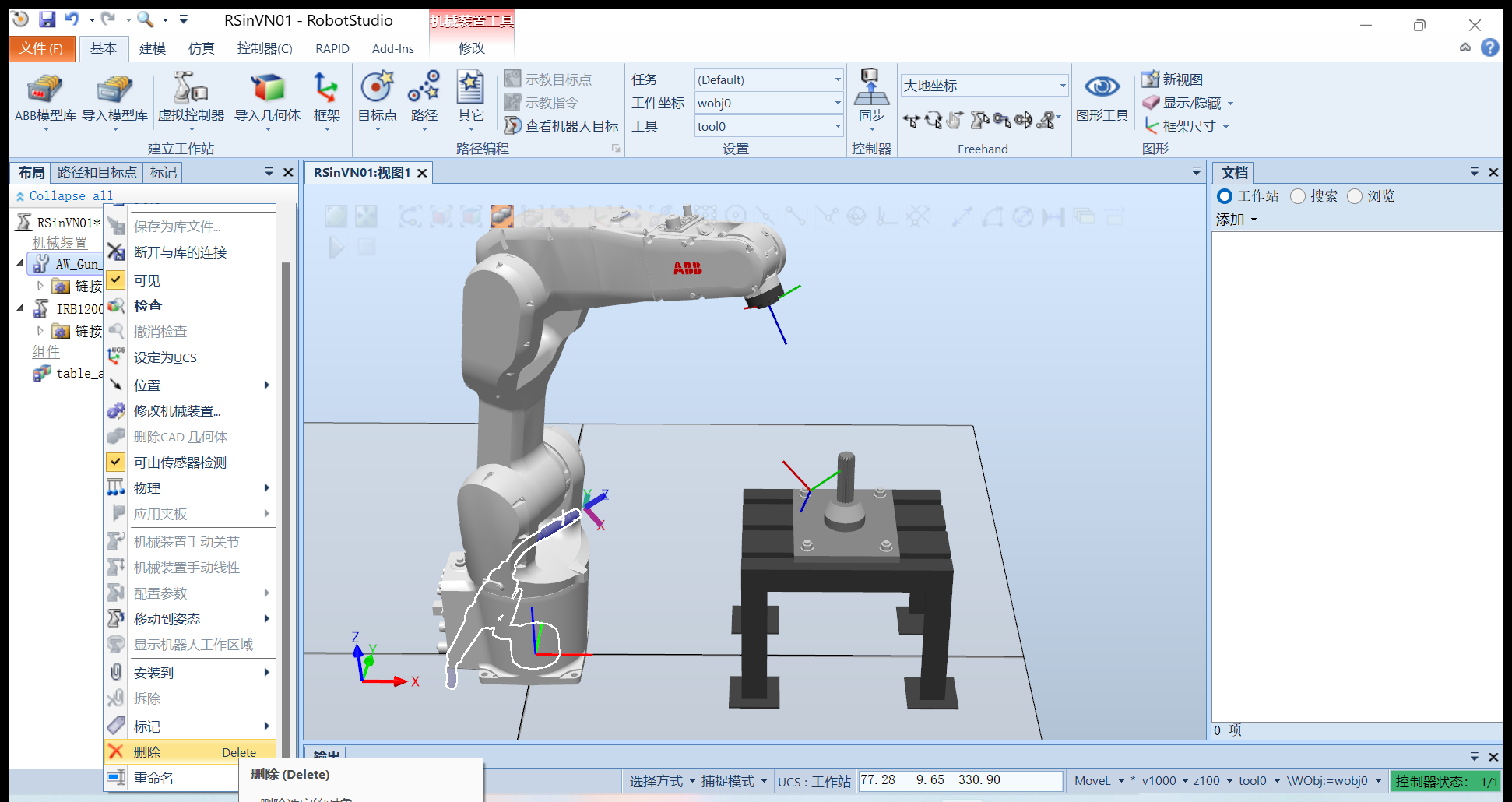
拆除模型:
选中要拆除的模型,在左侧布局选项卡中选择模型,右击选择拆除:
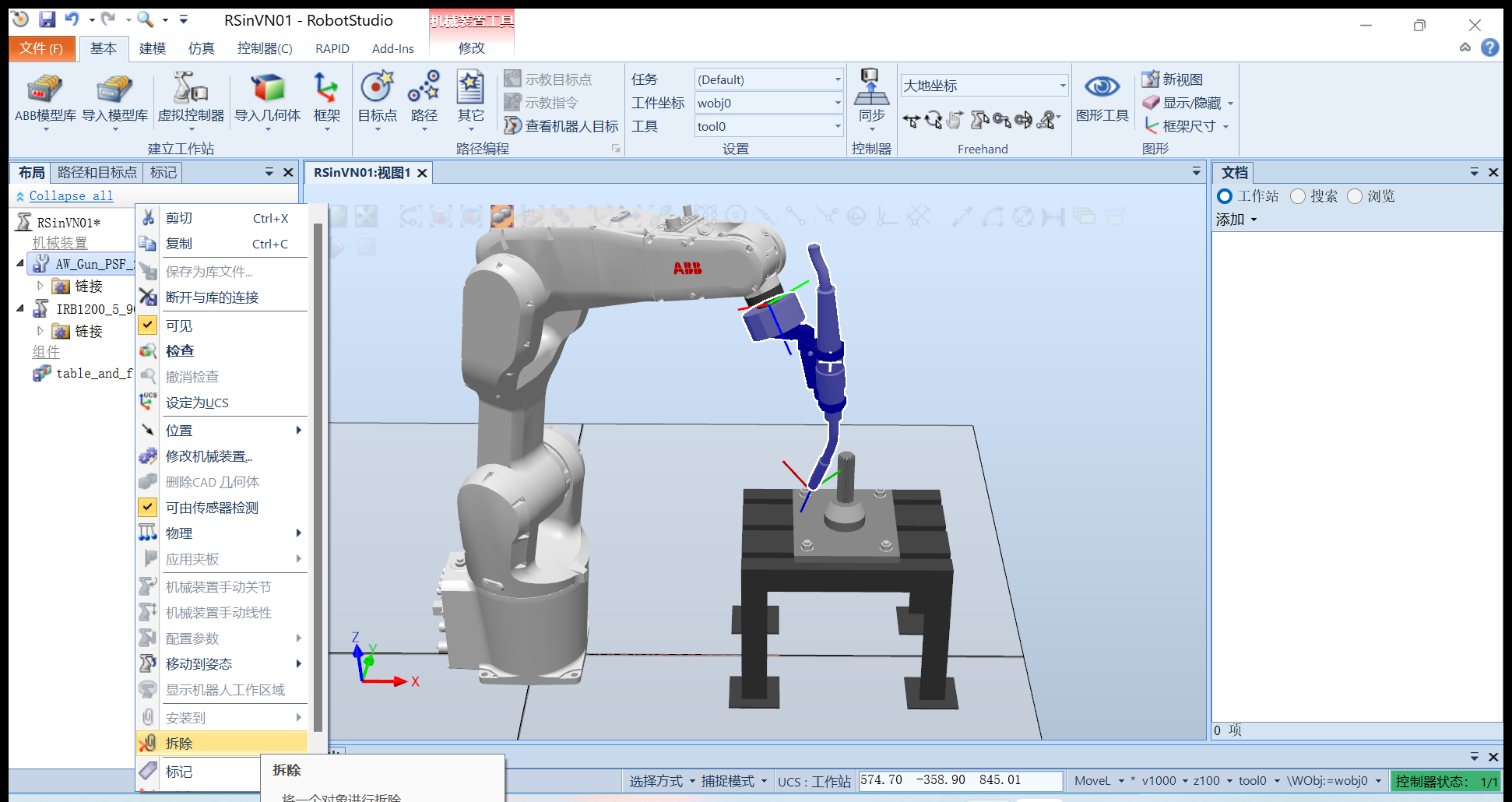
模型会回到原点,再到左侧布局选项卡选择模型,右击选择删除:
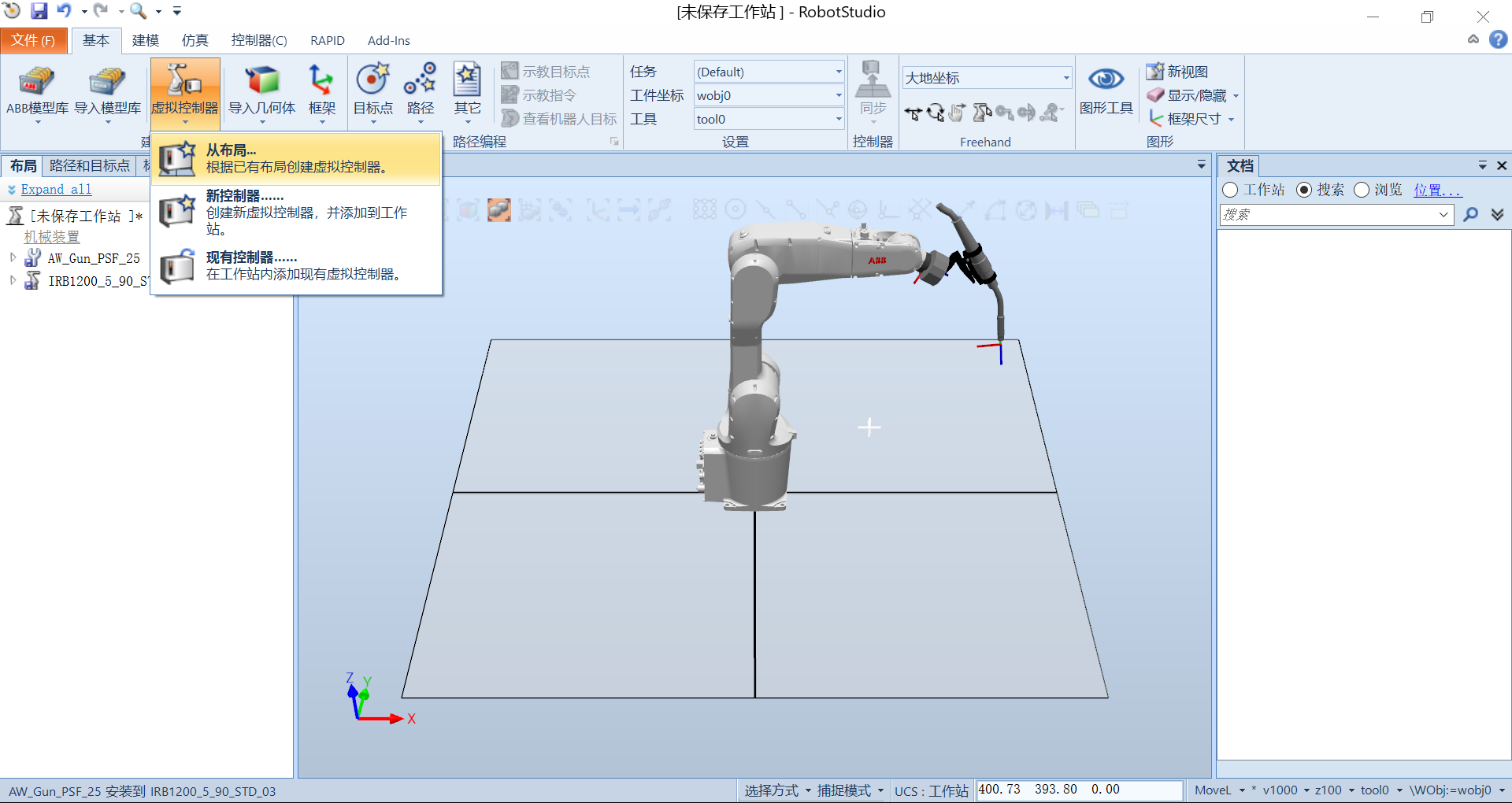
从布局导入虚拟控制器:
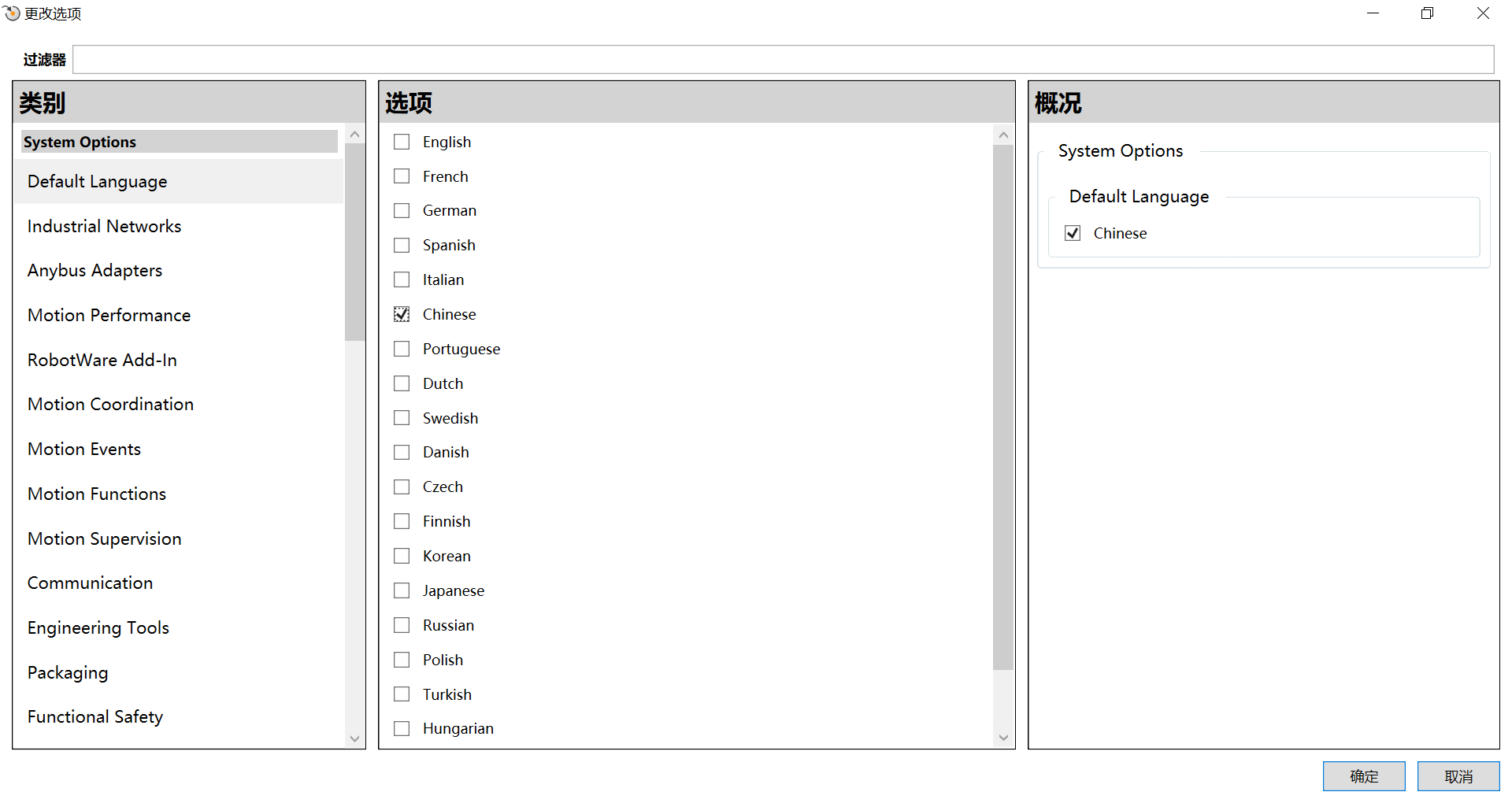
下一个,到配置选项:

选择默认语言:
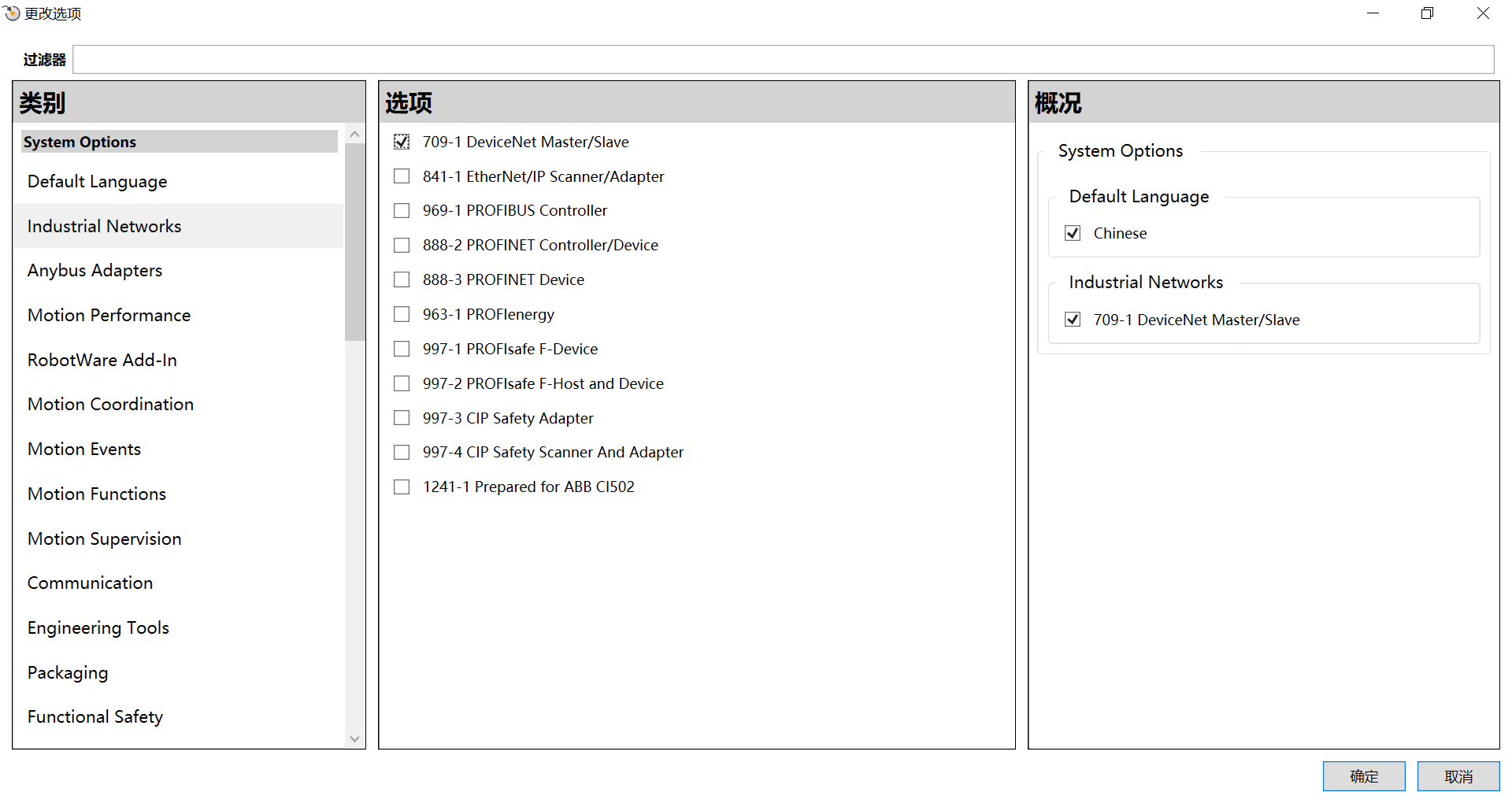
选择 Industrial Networks:
选择 Anybus Adapters:
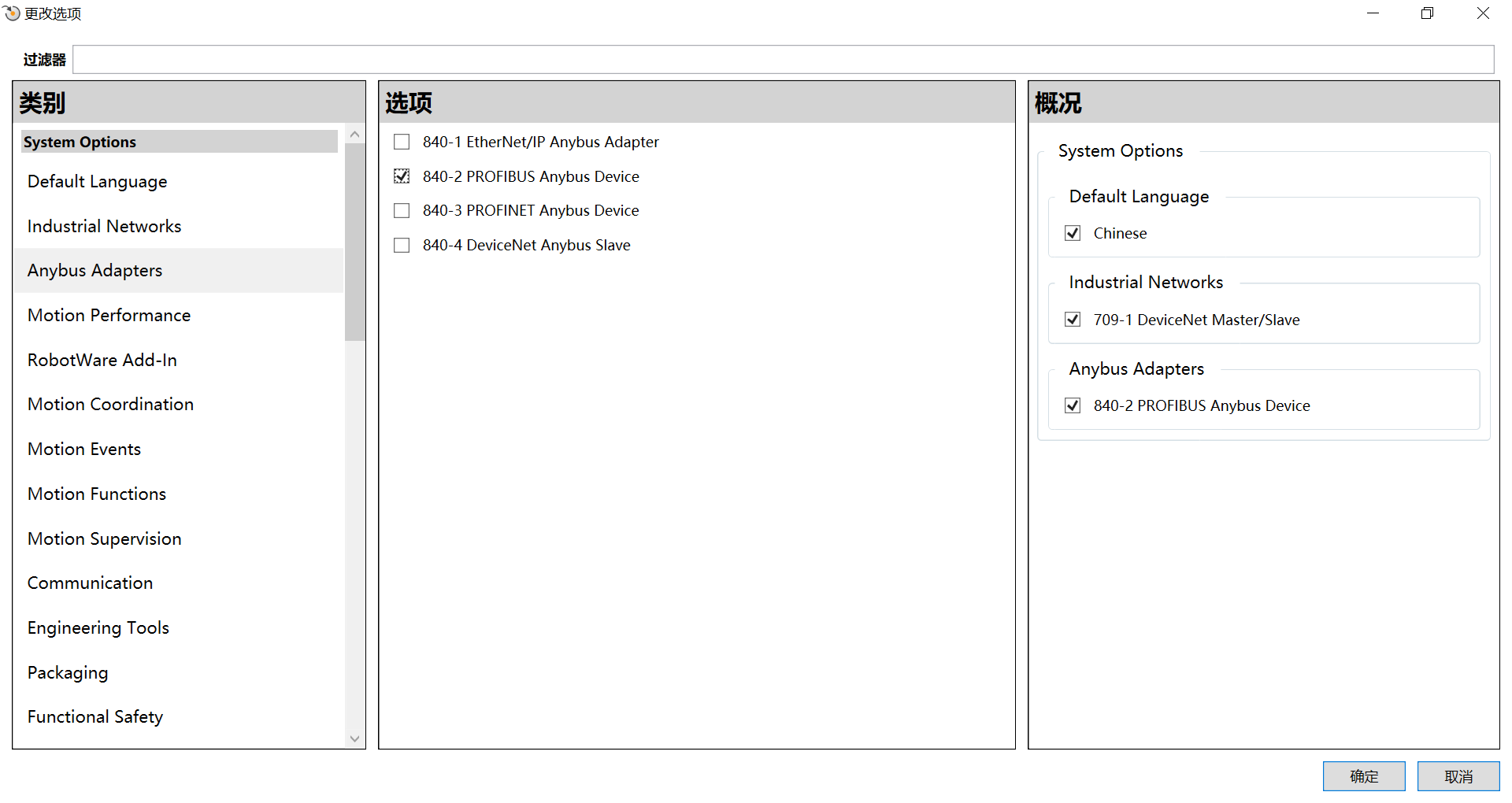
其它功能安装需要选择。等待控制器启动:
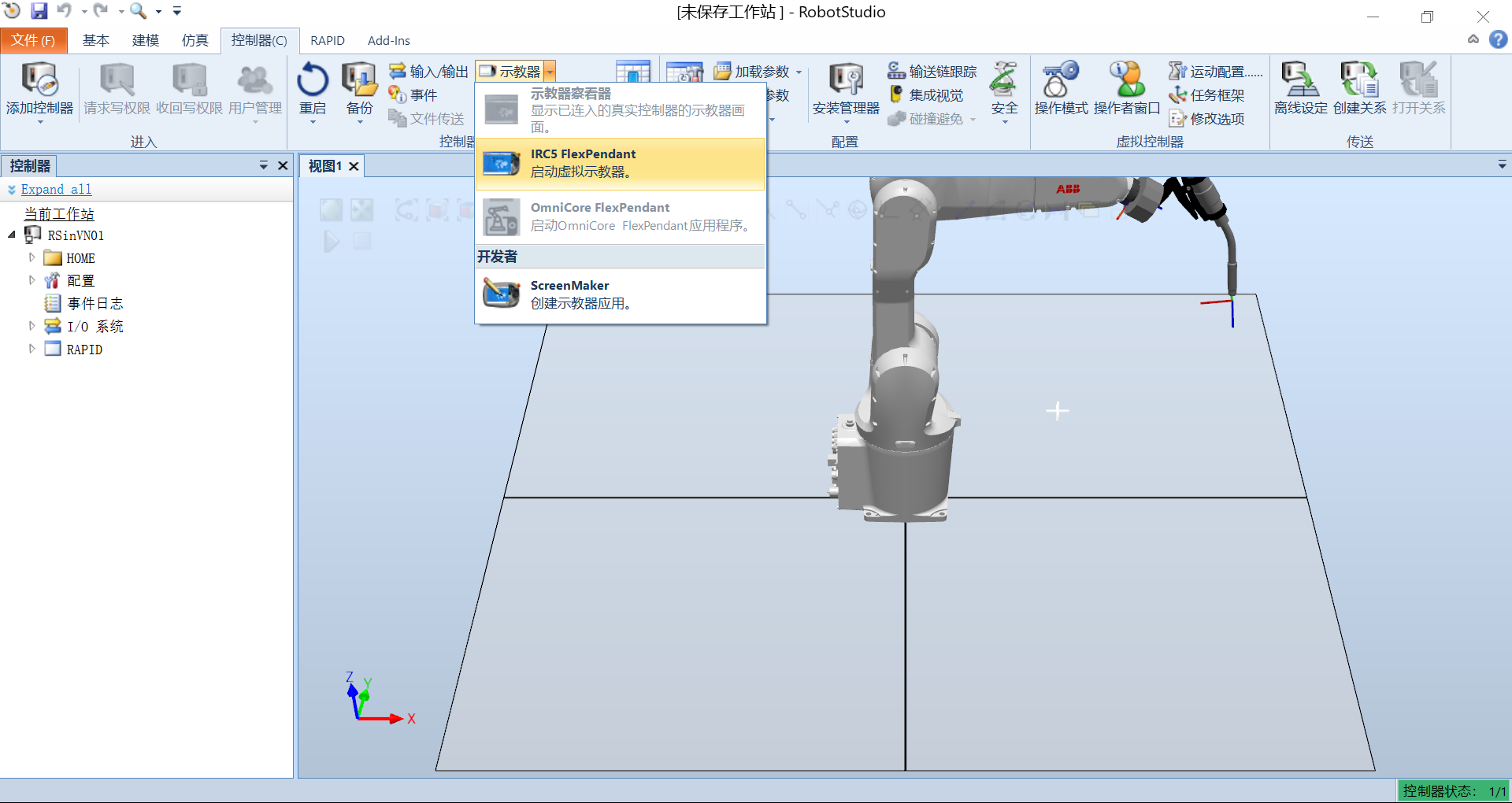
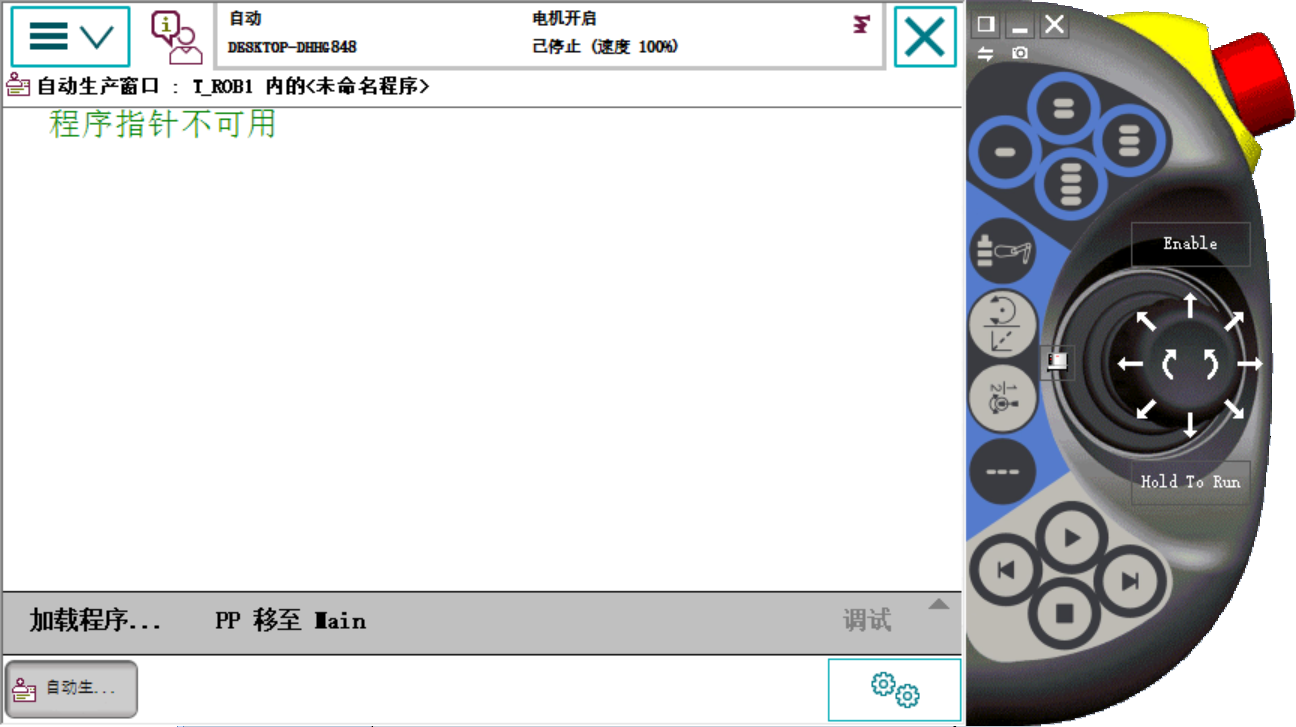
启动虚拟示教器:
至此RS初始练习环境已搭建完成:
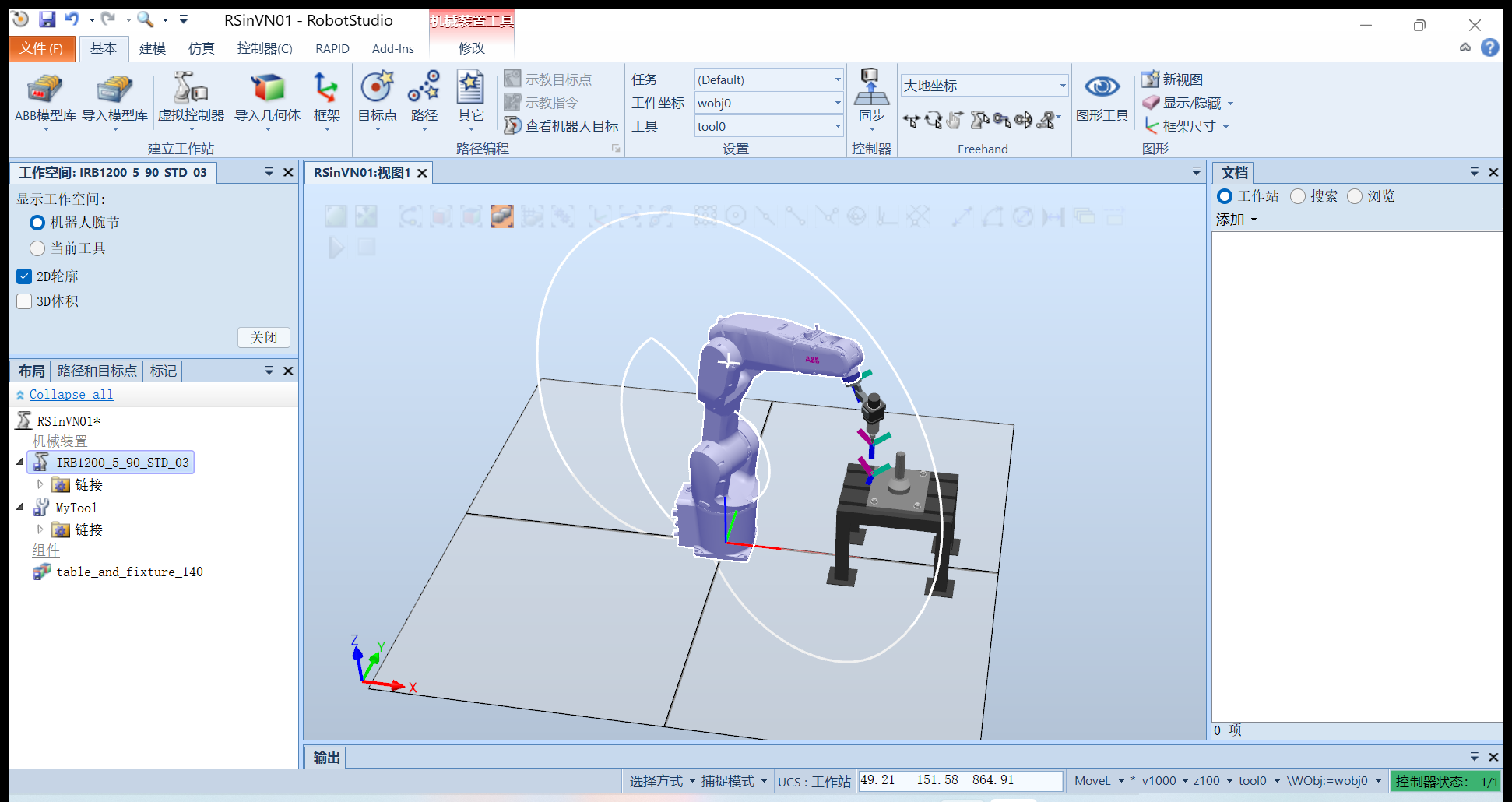
显示手臂工作区域:
在布局选项卡中,右击手臂,选择显示机器人工作区域:
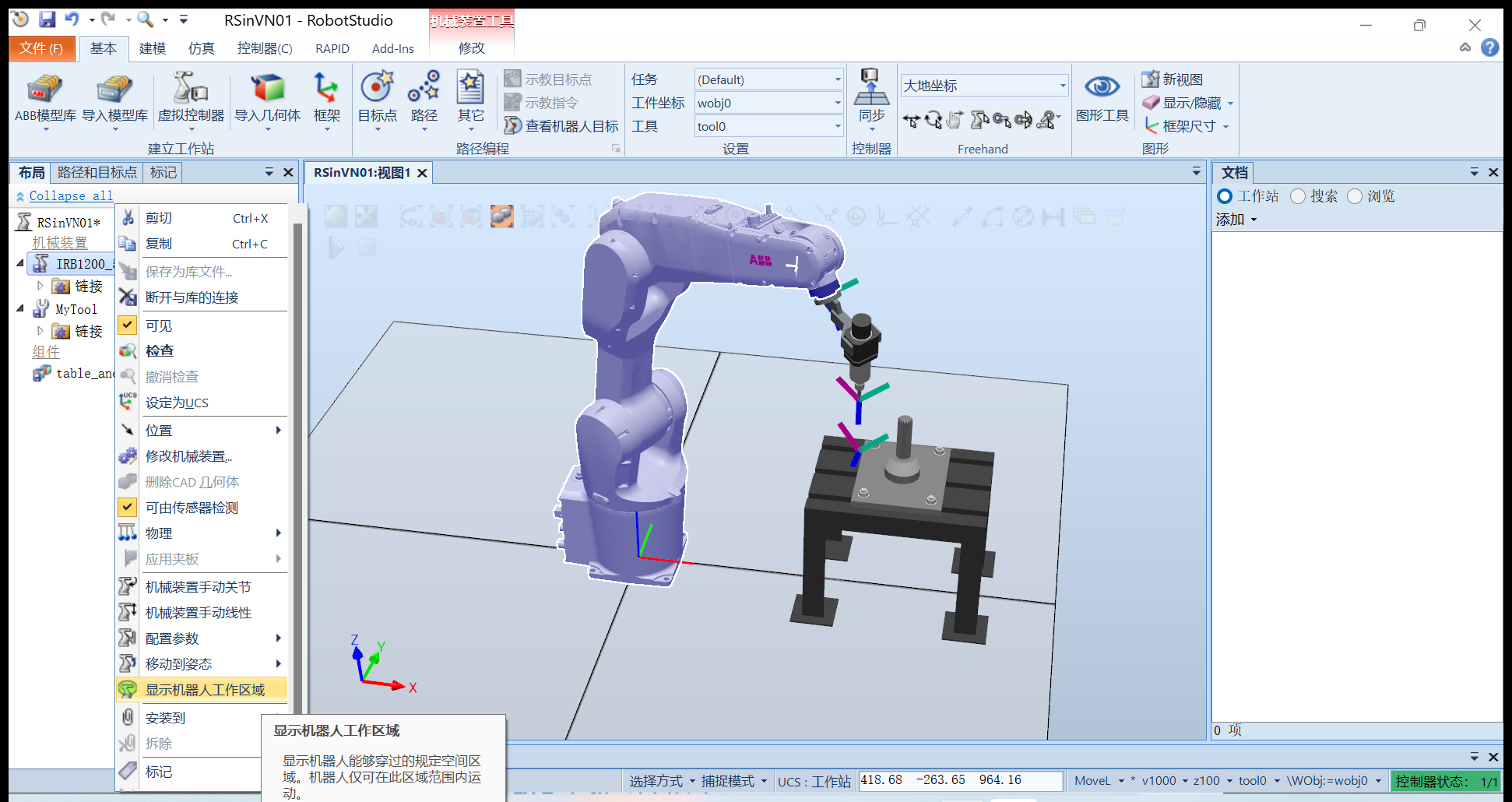
白线内区域即为手臂可达范围,工作对象应在此范围内:
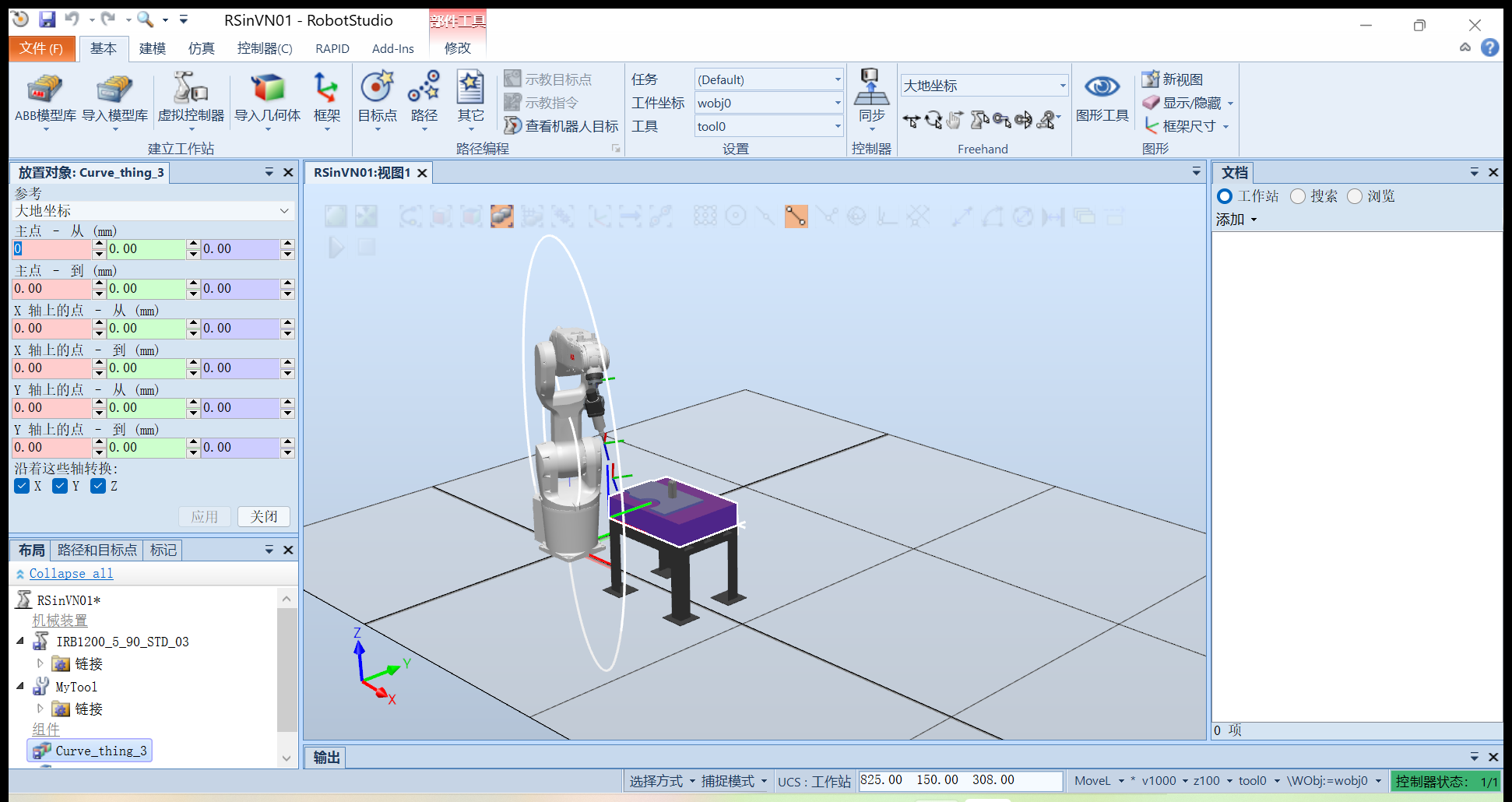
继续添加组件Curve Thing:
右击Curve Thing, 依次选择位置,放置,三点法:
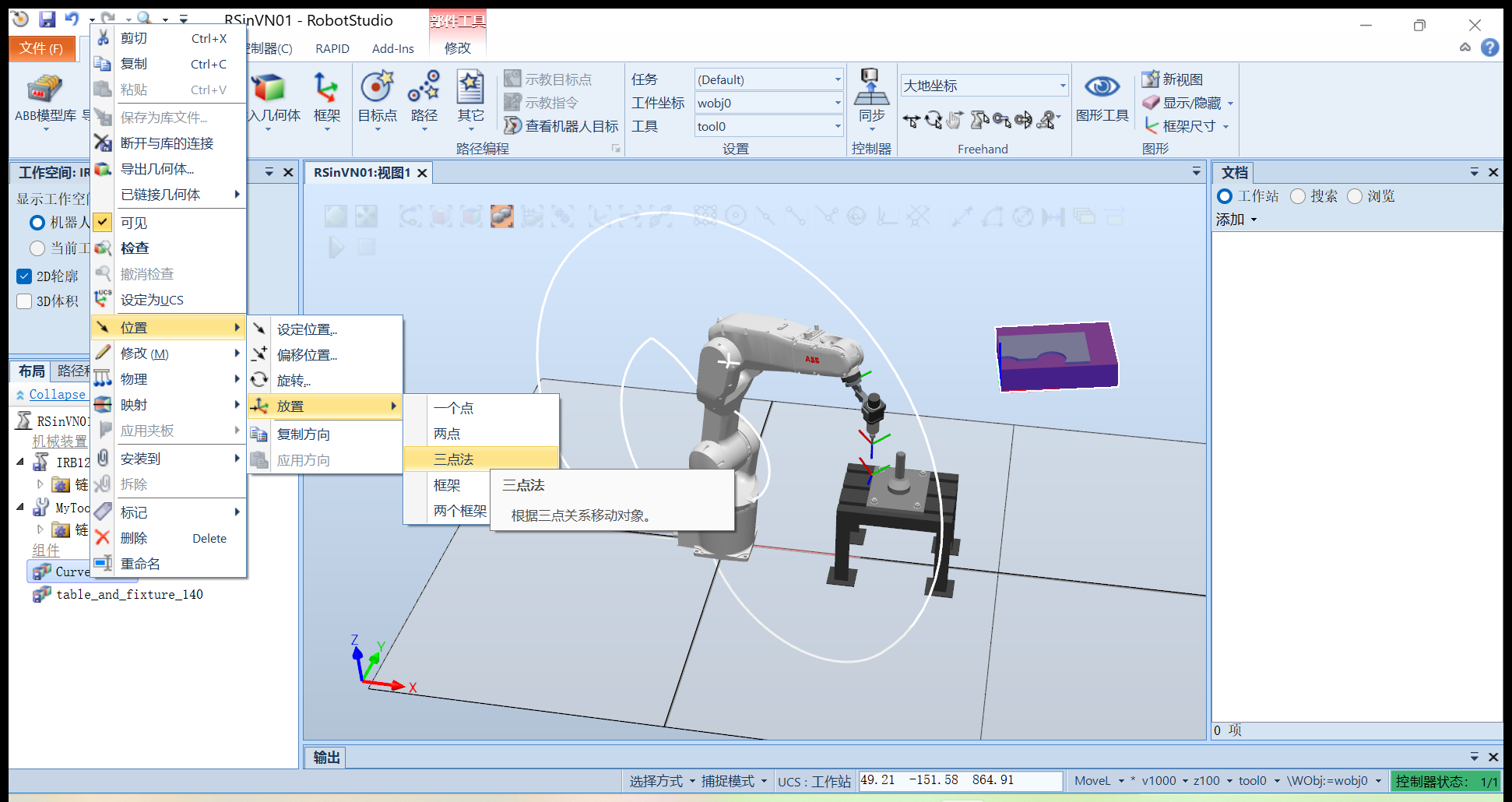
开捕捉工具的选择部件和捕捉末端,鼠标点击左侧窗口的第一个点,然后在右侧依次选择对应的6个端点:
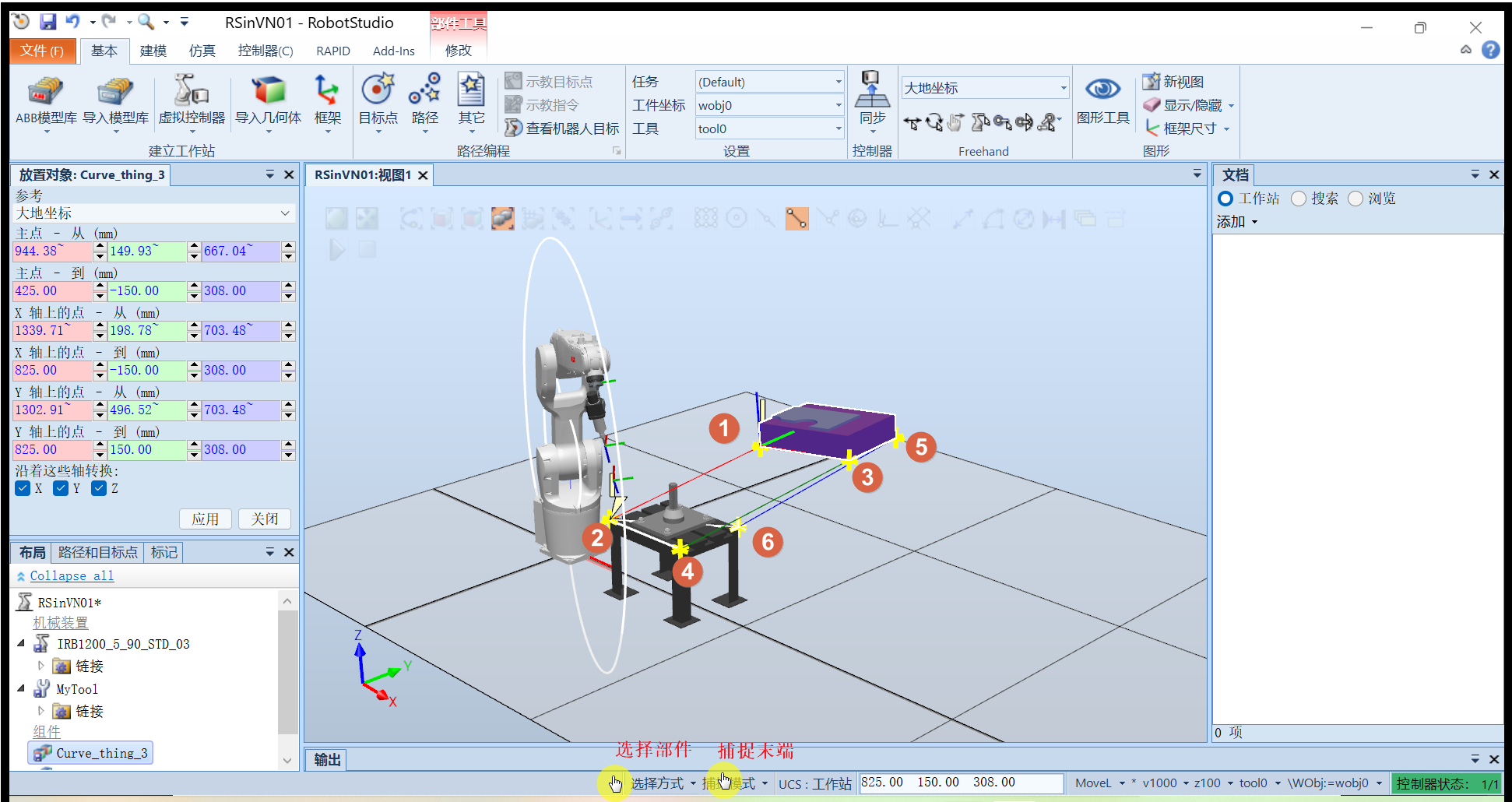
点击应用,工件即可放在桌子上了:
这个之前操作几次都失败了,后来按照上面的顺序选点才对的,目前还没有完全弄懂,后续再Update原因。
主要快捷键
| 快捷键 | 功能 |
|---|---|
| Ctrl + 鼠标左键 | 平移工作站 |
| Ctrl + 鼠标右键+拖动鼠标(左小右大) | 缩放工作站 |
| 鼠标中键滚动 | 缩放工作站 |
| Ctrl + Shift + 鼠标左键 | 旋转工作站 |
| Ctrl + B | 屏幕截图到剪贴板 |
Freehand 拖动/旋转模型
基本选项卡里面有一个Freehand控制面板,可以对模型进行拖动/旋转操作,也可以不使用示教器对手臂关键进行拖动:
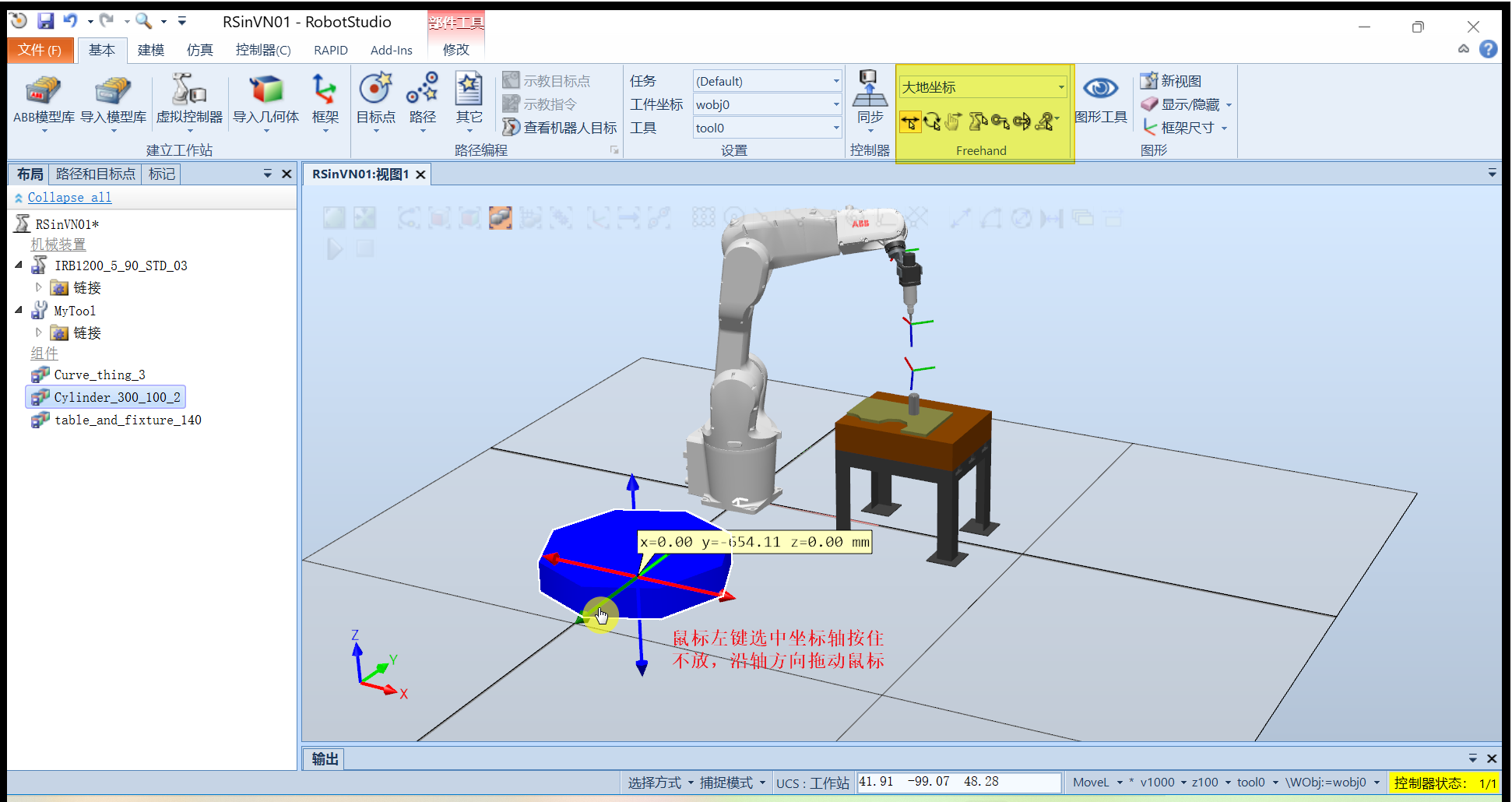
先在Freehand控制面板里面选择需要移动的方式,鼠标悬停图标是有提示文字。点击后回到视图页面选中模型,会出现坐标轴,选中坐标轴(或原点?)后,要一直按住鼠标左键不放拖动或者旋转。
目前拖曳和多个机器人手动操作还没有试成功,后续继续Update.
另外,在视图页面右击鼠标,结合不通的视图,配合Freehand的手动线性可以很方便的拖动工具模型定位: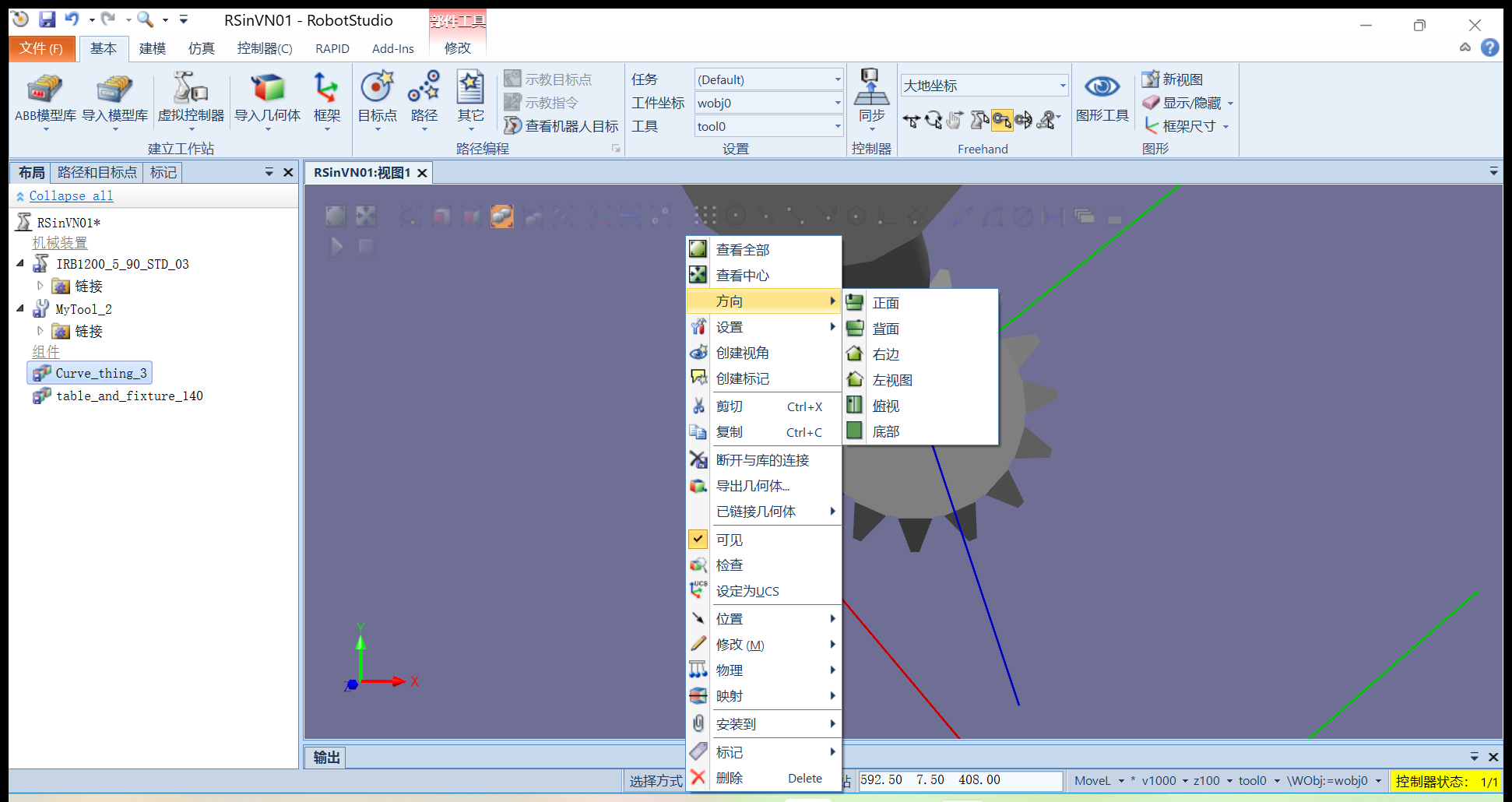
使用Freehand手动关节,第六轴不是很好选中,可以多试几次,不行的话换示教器操作。